1引言
步进电机被广泛应用于机械手、打印机及智能仪器仪表中。在具有高科技含量的机器人技术中,机器人的每个动作关节都离不开步进电机。但在某些应用过程中.两个同轴的步进电机不能满足执行机构所要求的转矩,且单片(或两片)驱动器IC(集成电路)不能提供大转矩所要求的驱动功率。多步进电机同轴联接及驱动装置的创新技术成功地解决了上述问题。
2步进电机及控制驱动原理
步进电机区别于其他控制电机。其特点是通过输入脉冲信号来进行控制,步进电机的驱动原理是通过它每相线圈中的电流的顺序切换来使电机作步进式旋转。每输人一个有规律的脉冲信号.步进电机就转动一个固定的角度.总转动角度由输入脉冲个数决定,步进电机的转速由脉冲信号频率决定。本文中采用了北京微电机厂生产的SB一2P型步进电机f额定电压:-24V:额定电流:0.2A;额定步距:3°;相数:3相)。若A、B、C以3相3拍方式工作,则通电次序:正转为A-B-C-A…反转为A-C-B-A…。
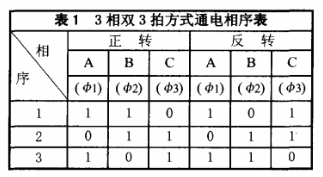
这种3相3拍的通电次序在脉冲换接时,一相绕组断电后另一相绕组才开始通电,这样在电源换接时步进电机容易出现失步或在平衡位置产生振荡,定位精度不高。为了改善度进电机的运行性能,驱动方式采用3相双3拍或3相6拍方式。3相双3拍方式工作的通电相序表,如表1所示。
3多步进电机同轴联接及驱动的构思
3.1双端轴的多步进电机同轴联接
双端轴,即每个步进电机的两个端面都有电机轴。双端轴的多步进电机同轴联接结构示意图。如图1所示。将多个步进电机同轴联接后,可实现转矩的多倍增加。值得注意的是,要求必须采用型号、参数都相同的步进电机,且步进电机轴必须同轴心。

3.2单端、双端轴混合的多步进电机同轴联接
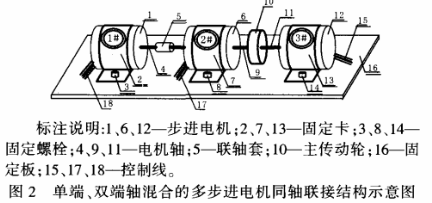
单端轴,即步进电机的两个端面上只有一端有电机轴。单端、双端轴混合的多步进电机同轴联接的结构示意图,如图2所示。图中1撑、3撑步进电机为单端轴.2撑步进电机为双端轴。同样,将多个步进电机同轴联接后.可实现转矩的多倍增加。这种方法除需要注意必须采用型号、参数都相同的步进电机方法除需要注意必须采用型号、参数都相同的步进电机且电机轴必须同轴心外.由于主传动轮两侧的步进电机旋转方向相反, 还需将3#步进电机的B(φ2)、φ3)相进行相互对调。
3.3多步进电机同轴联接的驱动
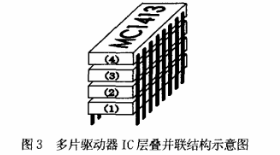
步进电机与其他交流电机不同,仅仅接上电源是不能满足:丰稗序.工作要求,即使输入了脉冲信号。还必须连接相应的驱动器才ORG 2000H能工作。要同时驱动多个同轴联接的步进电机,通常的单片(或两片)功率驱动器IC(集成电路)不能提供大转矩所要求的驱动功率。为此。采用了多片驱动器IC层叠并联技术。它是将多片驱动器IC芯片逐一层叠并联并按引脚号一一对应焊接而实现。多片驱动器Ic层叠并联结构示意图,如图3所示。
特别注意,必须选用同厂家、同型号、同参数、同批生产的IC。采用多片驱动器Ic层叠并联技术.可在不增加硬件电路板面积的基础上使驱动功率多倍增加.降低了硬件成本。
4硬件软件设计实例
4.1硬件设计
多步进电机同轴联接及驱动装置硬件电路原理图.如图4所示。89C51的P1.0、P1.1、P1.2口输出控制步进电机的脉冲信号,分别对应连接到4片层叠并联的1413IC的IN1、IN2、IN3。通过反相驱动,OUTl、OUT2、OUT3分别对应连接到1#、2#、3#步进电机的φ1、φ2、φ3,实现同时对3个步进电机的驱动。
本例中步进电机的每相额定电流为0.2A,则3个步进电机每相额定电流为:
0.2A*3=0.6A (1)
因3相双3拍方式工作时,每个步进电机旋转时有2相同时通电,则3个步进电机工作的额定电流为:
O.2A*3*2=1.2A (2)
由相关资料查得MCl413反相驱动器lC每级的最大电流为0.5A,由上式(2)可知,一片(或两片)MCl413反相驱动器IC不能满足对多步进电机同时驱动的要求,且驱动器在使用时不能长时间工作在最大驱动电流状态。为了满足上述要求并留有余地,故选用4片MCl413反相驱动器IC层叠并联构成驱动电路。图4中,MCl413 IC中的二极管起到对步进电机线圈中的反电势的释放作用,以保护步进电机和驱动器IC不受损坏。R1-R3为限流电阻。

4.2软件设计
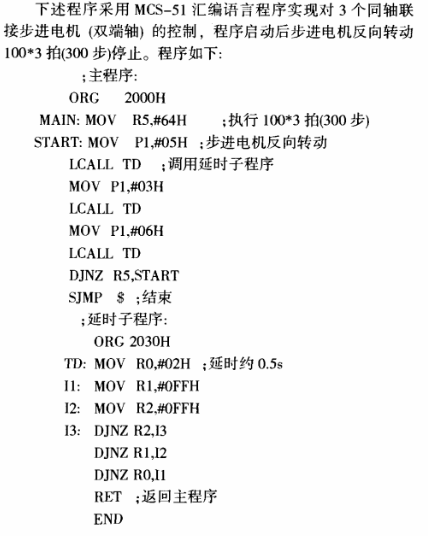
下述程序采用MCS-51汇编语言程序实现对3个同轴联接步进电机(双端轴)的控制。程序启动后步进电机反向转动100*3拍(300步)停止。程序如下
5结束语
"多步进电机同轴联接及驱动装置"已获中国国家专利(专利号:ZL03266939.9),并已成功的应用于单片机控制的仿真提升装置中。本文作者的创新点:解决了当采用双步进电机同轴联接及驱动时仍不能满足所要求的转矩与驱动功率的实际问题:多片驱动器Ic层叠并联技术,可在不增加硬件电路板面积的基础上使驱动功率多倍增加,降低了硬件成本。该项专利技术也可推广到四个步进电机同轴联接及驱动中去。