引言
步进电机是控制执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统和精密机械等领域。步进电机将电脉冲信号转换成相应角位移或线性位移的驱动装置,其转动速度和脉冲频率能严格同步,具有较高的重复定位精度,且没有累积误差[1]。步进电机的驱动是由驱动电路实现的,驱动电路和步进电机构成一个有机整体[2]。
步进电动机具有结构简单、可靠性高和成本低的优点[3],但同时也存在振荡、失步以及精度不够的问题[4],从而制约了在高精确度自动控制系统中的应用,如雕刻机、打印机、硬盘驱动器、绘图仪、钻孔机等。采用细分控制可以很好地提高精度,因此对基于单片机控制的步进电机步距角细分系统进行设计与研究有着实际的意义。
1原理与方案
1.1细分原理
细分控制本质上是对步进电机的励磁绕组中的电流进行控制,使内部的合成磁场为均匀的圆形旋转磁场。合成磁场矢量的幅值决定了步进电机旋转力矩的大小,相邻两合成磁场矢量的夹角大小决定了该步距角的大小。
细分就是将输入脉冲从原来的电流方波细分成以若干个等幅、等宽上升和下降的电流阶梯波。电流波形有多少个台阶,转子就会以同样的个数转过一个步距角。
这种将1个步距角细分成若干步的驱动方法称为“细分驱动”。
细分驱动的特点是,可以在不改变电机结构参数的情况下,使步距角减小、提高精度;同时能使步进电机运行平稳,提高匀速性,此外,还能减弱或消除振荡。
1.2细分方案
如采用DSP的软件细分方式,具有编程的灵活性、细分的成本低、效率高的优点,但单一的软件细分在精度与速度兼顾上会有矛盾。细分的步数越多,精度越高,但步进电机的转动速度却会降低;要提高转动速度,细分的步数就得减少。
如采用FPGA的全数字化控制方式,工作过程为PWM的输出经过驱动模块控制电机的绕组电流。电机的绕组电流被采样后变成电压信号输入到电流传感器,传感器输出占空比变化的PWM波输入到FPGA中,FPGA根据输入的PWM波的占空比的值确定反馈电流的大小;但这种方式存在功耗高,成本高的缺点。
如采用脉冲调制单片机细分控制方式,单片机按控制要求输出驱动脉冲,经过TA8435集成芯片放大调制,形成的阶梯波对电机进行细分控制。由于单片机细分控制在精度与速度上不存在矛盾,两者可以单独运行,而且单片机成本低,结构简单,可以实现步距角的细分,提高步距角细分的精确性,所以单片机细分控制是比较理想的低成本细分方案。
2系统设计
为便于实验调试以及系统的设置与监控,系统主要由步进电机、AT89C51单片机、TA8435步进电机细分芯片、LED显示模块、 波形显示模块、按键等几部分构成,如图1所示。从功能上又可分为方波与阶梯波两部分。

图1系统结构框图
2.1方波部分
AT89C51是一种低功耗、高性能CMOS 8位单片机,具有8 KB可编程Flash存储器,在外围电路配合下输出对应的需要步进电机动作的方波。脉冲的个数和频率直接对旋转角度和转动速度进行控制,按键与显示模块可以方便地设置和监控。
2.2阶梯波部分
TA8435是产生阶梯波的核心芯片,波形显示模块可以直观显示阶梯波形。
(1) TA8435的特点
TA8435是东芝公司生产的单片正弦细分二相步进电机驱动专用芯片,具有以下特点:
① 工作电压范围宽(10~40 V);
② 输出电流可达1.5 A(平均)和2.5 A(峰值);
③ 具有整步、半步、1/4细分、1/8细分运行方式供选择;
④ 采用脉宽调试式斩波驱动方式;
⑤ 具有正/反转控制功能;
⑥ 带有复位和使能引脚;
⑦ 可选择使用单时钟输入或双时钟输入。
(2) TA8435的内部结构
TA8435主要由1个解码器、2个桥式驱动电路、2个输出电流控制电路、2个最大电流限制电路、1个斩波器等功能模块组成,内部结构如图2所示。

图2 TA8435的内部结构框图
(3) TA8435的引脚
TA8435的引脚如表1所列。
表1引脚功能说明

(4) TA8435的细分工作原理
在图3中第一个CK时钟周期时,解码器打开桥式驱动电路,电流从VM A流经电机的线圈后经RNF A后与地构成回路。由于线圈电感的作用,电流是逐渐增大的,所以RNF B上的电压也随之上升。当RNF B上的电压大于比较器正端的电压时,比较器使桥式驱动电路关闭,电机线圈上的电流开始衰减,RNF B上的电压也相应减小;当电压值小于比较器正向电压时,桥式驱动电路又重新导通。如此循环,电流不断的上升和下降形成锯齿波,其波形如图3中IA波形的第1段。另外由于斩波器频率很高,一般在几十kHz(其频率大小与所选用电容有关),在OSC作用下,电流锯齿波纹是非常小的,可以近似认为输出电流是直流。在第2个时钟周期开始时,输出电流控制电路输出电压UA达到第2阶段,比较器正向电压也相应为第2阶段的电压,因此,流经步进电机线圈的电流从第1阶段也升至第2阶段2,电流波形如图IA的第2部分。第3、4时钟周期的工作原理与第1、2周期是一样的,只是又升高了比较器的正向电压而已。如此最终形成阶梯电流,即加在线圈B上的电流。在CK一个时钟周期内,流经线圈A和线圈B的电流共同作用,步进电机运转一个细分步。

图3TA8435的细分工作原理

图4步进电机细分驱动电路
(5) 电路中TA8435引脚的设定
① TA8435的工作方式设定。TA8435有4种工作方式,分别代表着无细分、2细分、4细分、8细分。工作方式由M1、M2引脚电平的组合来决定: M1=0、M2=0时,细分数=无; M1=0、M2=1时,细分数=2; M1=1、M2=0时,细分数=4; M1=1、M2=1时,细分数=8。本设计为了步进电机能平稳工作,选择8细分,即将M1、M2置为高电平。
② 控制脉冲的输入设定。TA8435有两个脉冲输入引脚CK1、CK2,可以用来输入两路脉冲。当其中一个引脚输入脉冲时,另一个引脚必须保持高电平。本设计中,控制脉冲只有一路,因此直接接入CK1,同时将CK2置高,即可满足要求。
③ 驱动电流的设定。TA8435输出的驱动电流由VNF和NFA、NFB引脚上所连的检测电阻RNF决定,公式为IO=VNF/RNF;而VNF的大小由REF IN引脚电平决定,即高电平时VNF=0.8 V,低电平时VNF=0.5 V。本设计中所需驱动电流为1.5 A,因此设定REF IN引脚为高电平,RNF=0.53 Ω。步进电机细分驱动电路如图4所示。

图5电机接口电路
(6) 步进电机接口
本电路采用四相六线制的PM42L048系列永磁步进电动机。电机的主要参数为:步距角7.5°,步距角精度±7%。电机接口电路如图5所示,四相按二相使用可以提高步进电机的输出转矩。D1~D4快恢复二极管用来泄放绕组电流,其型号为IN5822。
3运行测试
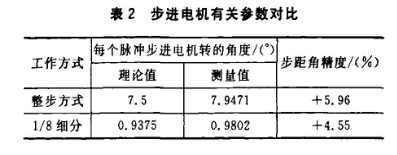
在同等条件下做两个实验:51单片机按照键盘的设置输出相应时序的脉冲,此脉冲为TA8435的输入标准信号。实验1设置整步运行工作方式,TA8435输出的脉冲没有变化;实验2设置1/8细分运行工作方式,TA8435输出的脉冲变化为上升与下降均有8个阶梯波形,以实现对步进电机的细分。1/8细分时,每个脉冲转0.981 7°,转换成步距角为0.980 2°×8=7.841 6°。与整步运行方式测量值比较过后,其步距角精度提高23%。每个脉冲步进电机转的角度如表2所列。
表2步进电机有关参数对比
结语
在低速工作时,可以选用1/4细分或1/8细分模式,以提高步距角精度;在高速工作时,细分模式有可能达不到要求的速度,这时可以选用整步或半步方式,步进电机运行稳定,振动小、噪声也小。采用单片机可以方便地控制TA8435在几种工作模式之间的切换,而且TA8435细分芯片具有价格低、控制简单、工作可靠的特点,所以本方案实现的细分控制技术可以有效地提高步进电机的控制精度,减小步进电机的振动并降低其噪声。
此项目是课题组在福建省科技厅的支持下研究开发的,其已在智能居家系统中的动作执行部分运行;工作可靠,性能稳定。