I2C总线是Philips公司提出的一种集成电路IC器件之间相连接的总线协议,其目的是使电子系统(不只 限于单片机系统)各个IC器件之间的连线变得容易。因为使用传统的并行总线在IC器件之间连接,往往会使得IC之间连线较多,显得非常复杂。而I2C总线 则使IC器件之间只需SDA、SCL两条连线就可以传送数据,因而十分方便。由于I2C在印刷体中不容易书写(需要上标),所以实际书写时,还常见到 IIC、I2C等书写方法,本文采用IIC的写法,敬请注意。关于IIC总线的知识,请参阅相关书籍,此处不再做进一步介绍。
I2C总线是Philips公司提出的一种集成电路IC器件之间相连接的总线协议,其目的是使电子系统(不只 限于单片机系统)各个IC器件之间的连线变得容易。因为使用传统的并行总线在IC器件之间连接,往往会使得IC之间连线较多,显得非常复杂。而I2C总线 则使IC器件之间只需SDA、SCL两条连线就可以传送数据,因而十分方便。由于I2C在印刷体中不容易书写(需要上标),所以实际书写时,还常见到 IIC、I2C等书写方法,本文采用IIC的写法,敬请注意。关于IIC总线的知识,请参阅相关书籍,此处不再做进一步介绍。
本文引用地址: http://www.21ic.com/app/mcu/201701/701380.htm
下面我们用一个使用IIC总线连接器件的例子来简单说明IIC总线的仿真。
例.EEPROM24C02是采用IIC接口的一种常用2Kbit(256×8bit)的存储器。编写程序使用AT89C51的IO口模拟实现IIC总线协议进行通信,并向24C02存储器内从字节0到字节FF写入数字0到FF。
51系列单片机本身没有IIC接口,但一些本身具有IIC接口的单片机往往是高端产品,一方面价格不菲,另一方面我们的系统也没有必要使用之。通常我们就使用软件通过51系列单片机的IO口来模拟实现IIC总线通信。
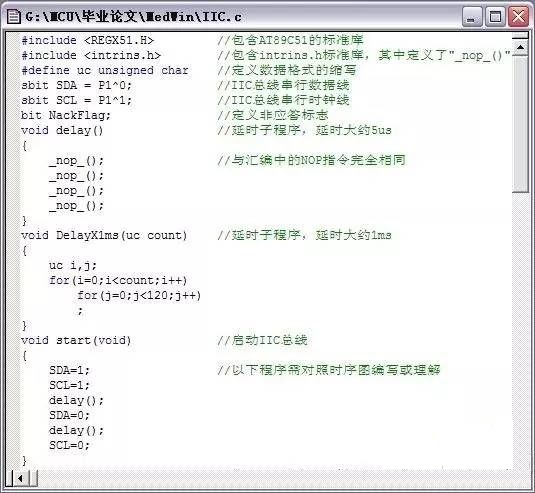
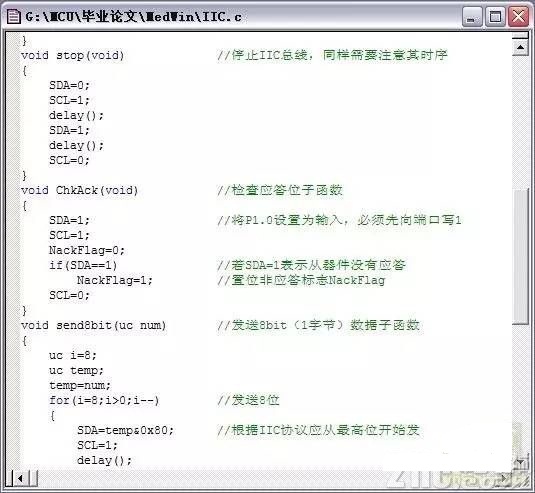
本例事实上比较简单,但需要对IIC总线时序有较好的理解。源文件如下图所示(采用C51语言编写):

在Keil中编辑好源文件以后,接下来就可以建立工程文件并生成相应的源代码了,然后我们来绘制电路图。
此例的电路图极其简单。只需两个IC,即AT89C51和24C02C,和两个上拉电阻,而且上拉电阻还可以省略。至于连接,就更为简单了。最后得到绘制好的电路图如下图所示:

绘制好电路图,我们就可以将前面刚刚生成的程序源代码装入单片机了,装入以后,下面我们就可以来进行仿真了。
首先点击仿真按钮,系统没有什么反映,只有高低电平变化的颜色。我们要想查看结果,还要用前文中仿真扩展 RAM存储器的方法,先点击暂停,然后点击“Debug”菜单下的“I2C Memory Internal Memory – U2”子菜单来打开U2即EEPROM存储器24C02C的内容窗口“I2C Memory Internal Memory – U2”,然后我们就看到了其中的内容,也就是我们仿真程序的结果。如下图所示:
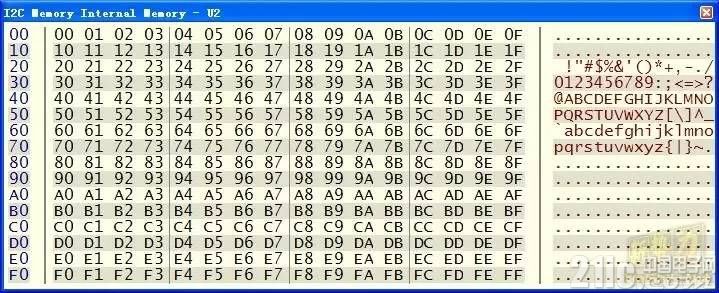
从图中我们能清楚地看到我们的仿真结果,程序完全正确地执行了我们的命令。
当然,如果你过早地点击了暂停按钮,那么你得到的结果可能和上图略有不同,那可能是因为程序尚未执行完毕。此时你可以继续点击运行按钮,或者点击单步按钮来仔细查看程序执行过程中24C02C存储器内容的改变情况。
完整代码如下:
/*----------------------------------------------------------------
Acess the eeprom--24c04
----------------------------------------------------------------*/
#include
#ifndef INT8U
#define INT8U unsigned char
#endif
#ifndef INT8S
#define INT8S signed char
#endif
#ifndef INT16U
#define INT16U unsigned int
#endif
#define I2C_DELAY; _nop_();_nop_();_nop_();_nop_();_nop_(); // >=4.7uS
//----------------------------------------------------------------
// delay 100us
//----------------------------------------------------------------
void mDelay(INT8U k)
INT16U i ;
for(; k>0; k--)
for(i=0; i<93; i++)
//----------------------------------------------------------------
//OK
//----------------------------------------------------------------
void I2C_Start(void)
SDA = 1;
I2C_DELAY;
SCL = 1;
I2C_DELAY;
SDA = 0;
I2C_DELAY;
I2C_DELAY;
//----------------------------------------------------------------
//OK
//----------------------------------------------------------------
void I2C_Stop(void)
SDA = 0 ;
I2C_DELAY;
SCL = 1 ;
I2C_DELAY;
SDA = 1 ;
I2C_DELAY;
I2C_DELAY;
//----------------------------------------------------------------
//
//----------------------------------------------------------------
I2C_DELAY;
void sendAck(void)
SCL = 0;
SDA = 0;
I2C_DELAY;
SCL = 1;
I2C_DELAY;
//----------------------------------------------------------------
//
//----------------------------------------------------------------
void sendNoAck(void)
SCL = 0;
I2C_DELAY;
SDA = 1;
I2C_DELAY;
SCL = 1;
I2C_DELAY;
//----------------------------------------------------------------
// 0 = noACK; 1 = ACK ;
//----------------------------------------------------------------
bit checkAck()
bit tempbit;
/*发送完一个字节后检验设备的应答信号*/
SDA = 1;
I2C_DELAY;
SCL = 0;
I2C_DELAY;
tempbit = SDA;
SCL = 1;
I2C_DELAY;
if(tempbit==1)
return 0; //noACK
else
return 1; //ACK
//----------------------------------------------------------------
//OK
// a positive clock edge clock a bit into the ROM
//----------------------------------------------------------------
void writeByte(INT8U datum)
INT8U bitCnt = 0 ;
for(bitCnt=0; bitCnt<8; bitCnt++)
SCL = 0 ;
I2C_DELAY;
if ((datum&0x80) == 0x80) //if the MSb is 1
SDA = 1 ;
else
SDA = 0 ;
I2C_DELAY;
SCL = 1 ;
I2C_DELAY;
datum<<=1 ;
//----------------------------------------------------------------
//OK
//----------------------------------------------------------------
INT8U readByte(void)
bit tempbit = 1 ;
INT8U temp = 0 ;
INT8U bitCnt ;
SDA = 1 ; // release the bus,ready to receive byte??????????????
I2C_DELAY;
for(bitCnt=0; bitCnt<8; bitCnt++)
SCL = 0; //?????????????????????????huan???????????????
I2C_DELAY;
tempbit = SDA ;
if (tempbit)
temp |= 0x01 ;
else
temp &= 0xfe ;
SCL = 1 ;
I2C_DELAY;
if(bitCnt<7)
temp <<= 1 ;
return(temp) ;
/*~~~~~~~~~~~~~~~~~~~~~~~ API ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~*/
/*-----------------------------------------------------------------
write some bytes to sequential address
-----------------------------------------------------------------*/
void writeToROM(INT8U datum[], INT8U address, INT8U num)
bit tempbit ;
INT8U i ;
INT8U *datum_P ;
datum_P = datum ;
I2C_Start() ;
writeByte(0xa0) ;
tempbit = checkAck();
writeByte(address) ;
tempbit = checkAck();
for(i=0; i
writeByte(*(datum_P+i)) ;
if(!checkAck())
I2C_Stop() ;
mDelay(100) ;
I2C_Stop() ;
/*-----------------------------------------------------------------
read some bytes from ROM`s sequential address
-----------------------------------------------------------------*/
void readFromROM(INT8U datum[], INT8U address, INT8U num)
bit tempbit ;
INT8U i ;
INT8U *datum_P ;
datum_P = datum;
I2C_Start() ;
writeByte(0xa0) ;
tempbit = checkAck();
writeByte(address) ;
tempbit = checkAck();
I2C_Start() ;
writeByte(0xa1) ;
tempbit = checkAck();
for(i=0; i
*(datum_P+i) = readByte() ;
if(i!=num-1)
sendAck() ;
else
sendNoAck() ;
I2C_Stop() ;
/*-----------------------------------------------------------------
wirte one byte to ROM --random write
-----------------------------------------------------------------*/
void writeOneByte(INT8U addr, INT8U datum)
bit tempbit ;
/*write a byte to mem*/
I2C_Start();
writeByte(0xa0);
tempbit = checkAck();
writeByte(addr); /*address*/
tempbit = checkAck();
writeByte(datum); /*the data*/
tempbit = checkAck();
I2C_Stop();
mDelay(100) ;
/*-----------------------------------------------------------------
read one byte from rom --random read
-----------------------------------------------------------------*/
INT8U readOneByte(INT8U addr)
bit tempbit = 1;
INT8U mydata;
/*read a byte from mem*/
I2C_Start();
writeByte(0xa0);
tempbit = checkAck();
writeByte(addr); /*address*/
tempbit = checkAck();
I2C_Start();
writeByte(0xa1);
tempbit = checkAck();
mydata = readByte();
tempbit = checkAck();
return (mydata) ;
I2C_Stop();