一、PWM
Pulse Width Modulation脉冲宽度调制,简称PWM。
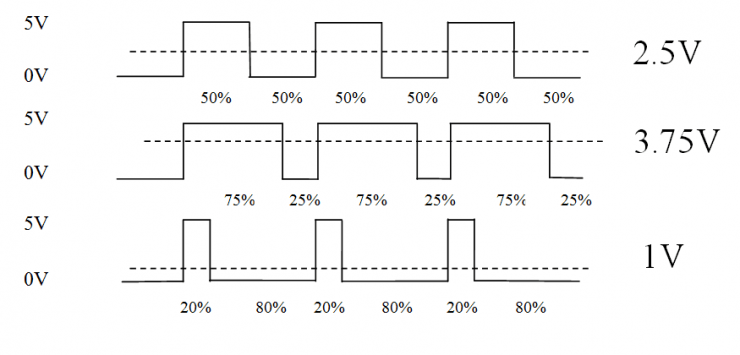
PWM(脉冲宽度调制)对模拟信号电平进行数字编码的方法,计算机只能输出0或5V的数字电压值而不能输出模拟电压,而我们如果想获得一个模拟电压值,则需通过使用高分辨率计数器,改变方波的占空比来对一个模拟信号的电平进行编码。
仍输出数字信号,因为满幅值的直流供电只有5V(1)和0V(0)两种。电压是以一种连接(1)或断开(0)的重复脉冲序列被夹到模拟负载上去的,连接即是直流供电输出,断开即是直流供电断开。通过对连接和断开时间的控制,只要带宽足够,可以输出任意不大于最大电压值的模拟电压。
输出电压=(接通时间/脉冲时间)*最大
二、51单片机的Timer
作者用的单片机是STC89C52,其内部有3个16位Timer,分别为T/C0,T/C1,T/C2,通过配置相关寄存器即可实现Timer的功能控制。
控制PWM需要用到定时器来生成不同占空比的波形,采用定时器中断的方式。
相关寄存器:
1.IE寄存器
位名称功能0EX0外部中断0的中断允许位1ET0Timer0的溢出中断允许位2EX1外部中断1的中断允许位3ET1Timer1的溢出中断允许位4ES串行口中断允许位5ET2Timer6--7EA中断允许总控制位
2. TCON寄存器
位名称功能0IT0外部中断0的触发方式选择位。功能和IE1类似1IE0外部中断0的中断请求标志位。功能和IE1类似2IT1外部中断1的触发方式选择位。当IT1=1时,为下降沿触发方式,也就是从高到低的跳变会触发外部中断1。当IT1=0时,为低电平触发,也就是单片机检测到该引脚电平为低时,会触发外部中断13IE1外部中断1的中断请求标志位。当IE1=1的时候,表示外部中断1被触发,正在请求单片机处理中断事件。当单片机相应中断,处理中断事件时,该位由单片机自动清零4TR0启动定时器/计数器0启动位,功能和TR1类似5TF0定时器/计数器T0溢出中断请求标志位。功能和TF1类似.6TR1启动定时器/计数器1启动位,TR=1启动计时,TR=0停止计时7TF1定时器/计数器T1溢出中断请求标志位。当T1溢出时,该位自动置1。单片机响应相应中断时,系统自动清零TF1,也可以程序清零
3. TMOD寄存器
控制Timer0/1的工作方式
位名称功能0M0工作方式选择位1M1工作方式选择位2C/T计数器模式和定时器模式选择位,C/T=1时,为计数器模式,C/T=0时,为定时器模式。C为counter的缩写,T为timer的缩写,这样方便理解3GATET1(0)的启动源选择位,GATE=1时,用外部中断引脚INT1(INT0)上的高电平来启动T1(T0);GATE=0时,用TCON里的TR1(TR0)来启动T1(T0)。4M0相似于0位5M1相似于1位6C/T相似于2位7GATE相似于3位M1M0工作方式00方式0,由TH1(TH0)的8位和TL1(TL0)的低5位组成一个13位定时器。01方式1,由TH1(TH0)的8位和TL1(TL0)的8位组成一个16位定时器。10方式2,TL1(TL0)溢出后,TH1(TH0)的数值自动填充到TL1(TL0)。11方式3,仅适用于T0,T0分成两个8位计数器,T1停止计数。
4. Timer0/1计数寄存器
TL0
TL1
TH0
TH1
当定时开启后,TL0(TL1)自动跟随机器周期加一。当TL0(TL1)满了后,自动清零同时向TH0(TH1)进一位,不需要手动操作.
而当TL0(TL1)和TH0(TH1)都满了以后,此时如果定时中断和总中断都已经打开,那么就会发生溢出中断,同时这两个寄存器清零
三、运用PWM完成呼吸灯
1. 硬件电路

2. 软件驱动
unsigned char PWM_COUNT; //计数
unsigned int HUXI_COUNT; //占空比更新时间
unsigned char PWM_VLAUE; //占空比比对值
bit direc_flag; //占空比更新方向
void timer0_init()
{
TMOD=0x02; //模式设置,00010000,定时器0,工作于模式2(M1=1,M0=0)
TH0=0x47; //定时器溢出值设置,每隔200us发起一次中断。
TL0=0X47;
TR0=1; //定时器0开始计时
ET0=1; //开定时器0中断
EA=1; //开总中断
PWM_COUNT =0;
}
void time0() interrupt 1
{
PWM_COUNT++;
HUXI_COUNT++;
if(PWM_COUNT == PWM_VLAUE) //判断是否到了点亮LED的时候
LED = 1; //点亮LED
if(PWM_COUNT == 10) //当前周期结束
{
LED = 0; //熄灭LED
PWM_COUNT = 0; //重新计时
}
if((HUXI_COUNT == 600) && (direc_flag == 0))
{ //占空比增加10%
HUXI_COUNT = 0;
PWM_VLAUE++;
if(PWM_VLAUE == 9) //占空比更改方向
direc_flag = 1;
}
if((HUXI_COUNT == 600) && (direc_flag == 1))
{ //占空比减少10%
HUXI_COUNT = 0;
PWM_VLAUE--;
if(PWM_VLAUE == 1) //占空比更改方向
direc_flag = 0;
}
}
void main()
{
HUXI_COUNT = 0;
PWM_COUNT = 0;
PWM_VLAUE = 5;
direc_flag = 0;
LED = 1; //默认LED熄灭
timer0_init(); //定时器0初始化
while(1);
}