总体原理:
摄像机标定(Camera calibraTIon)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
基本的坐标系:
世界坐标系;
相机坐标系;
成像平面坐标系;
像素坐标系
一般来说,标定的过程分为两个部分:
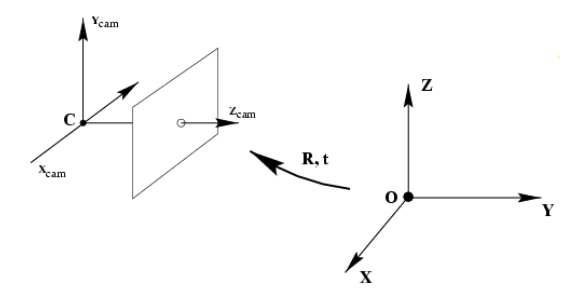
第一步是从世界坐标系转为相机坐标系,这一步是三维点到三维点的转换,包括R,t(相机外参,确定了相机在某个三维空间中的位置和朝向)等参数;
第二部是从相机坐标系转为成像平面坐标系(像素坐标系),这一步是三维点到二维点的转换,包括K(相机内参,是对相机物理特性的近似)等参数;
投影矩阵 : P=K [ R | t ] 是一个3&TImes;4矩阵,混合了内参和外参而成。
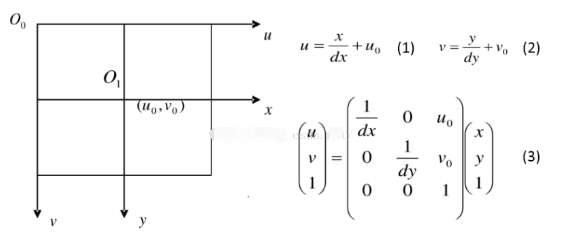
图像坐标系:
理想的图像坐标系原点O1和真实的O0有一定的偏差,由此我们建立了等式(1)和(2),可以用矩阵形式(3)表示。
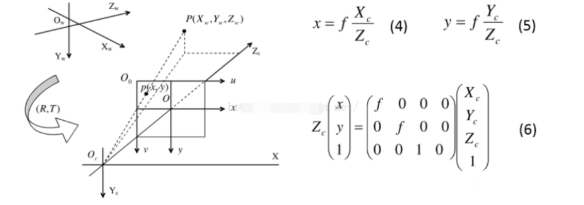
相机坐标系(C)和世界坐标系(W):
通过相机与图像的投影关系,我们得到了等式(4)和等式(5),可以用矩阵形式(6)表示。我们又知道相机坐标系和世界坐标的关系可以用等式(7)表示:
由等式(3),等式(6)和等式(7)我们可以推导出图像坐标系和世界坐标系的关系:
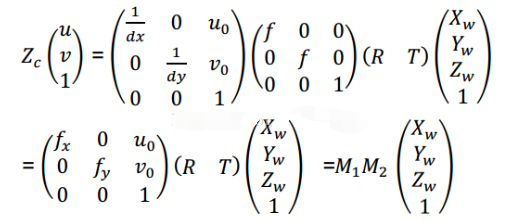
其中M1称为相机的内参矩阵,包含内参(fx,fy,u0,v0)。M2称为相机的外参矩阵,包含外参(R:旋转矩阵,T:平移矩阵)。
众所周知,相机镜头存在一些畸变,主要是径向畸变(下图dr),也包括切向畸变(下图dt)等。
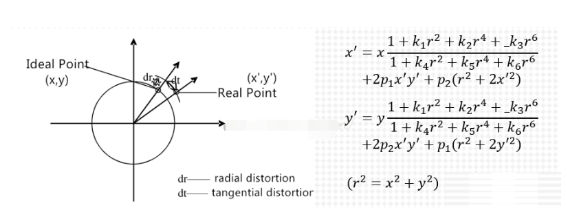
上图右侧等式中,k1,k2,k3,k4,k5,k6为径向畸变,p1,p2为切向畸变。在OpenCV中我们使用张正友相机标定法通过10幅不同角度的棋盘图像来标定相机获得相机内参和畸变系数。函数为calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs,flag)
objectPoints: 一组世界坐标系中的3D
imagePoints: 超过10张图片的角点集合
imageSize: 每张图片的大小
cameraMatrix: 内参矩阵
distCoeffs: 畸变矩阵(默认获得5个即便参数k1,k2,p1,p2,k3,可修改)
rvecs: 外参:旋转向量
tvecs: 外参:平移向量
flag: 标定时的一些选项:
CV_CALIB_USE_INTRINSIC_GUESS:使用该参数时,在cameraMatrix矩阵中应该有fx,fy,u0,v0的估计值。否则的话,将初始化(u0,v0)图像的中心点,使用最小二乘估算出fx,fy。
CV_CALIB_FIX_PRINCIPAL_POINT:在进行优化时会固定光轴点。当CV_CALIB_USE_INTRINSIC_GUESS参数被设置,光轴点将保持在中心或者某个输入的值。
CV_CALIB_FIX_ASPECT_RATIO:固定fx/fy的比值,只将fy作为可变量,进行优化计算。当CV_CALIB_USE_INTRINSIC_GUESS没有被设置,fx和fy将会被忽略。只有fx/fy的比值在计算中会被用到。
CV_CALIB_ZERO_TANGENT_DIST:设定切向畸变参数(p1,p2)为零。
CV_CALIB_FIX_K1,。。。,CV_CALIB_FIX_K6:对应的径向畸变在优化中保持不变。
CV_CALIB_RATIONAL_MODEL:计算k4,k5,k6三个畸变参数。如果没有设置,则只计算其它5个畸变参数。