位移测量的常见方法有图像分析法、双频激光测量法、光栅或磁栅测量法、磁阻或磁场测量法等。其中基于磁敏传感技术的磁性标尺型测最方法具有如下优点:不存在因相对运动出现的部件磨损问题;信息灵敏度高,动态响应好;易于实现传感器集成化、智能化;功耗低,安全可靠等。但目前的测量方法存在以下缺陷:
记数方式的相对晕测量,在失电后会丢失对正确位置的记忆:帧重叠编码方式的绝对景测量,容错能力差,表征长度受限。针对这些技术缺陷,本文提出了一种带有标志位的绝对式编码方法,使得识别出的序列含有用于粗读数的数值码和用于精读数的标识码,不仅避免了相对式测量的“失忆”问题,而且突破了绝对式测量的表征范围瓶颈,增强了容错能力。
1 编码规则
编码采用格雷码(Gray)为数值码,以某一固定码宽为参考码R,它用于标尺定位和提高精度。Gray码是一种绝对编码方式的无权码,它所具有的循环、单步特性能消除随机取数时出现重大误差的可能,其任意两个柏邻整数之间转换时,只有一个位数发生变化,大大减少了由一个状态转到下一个状态时的逻辑混淆,具有较强的容错能力。以6位编码为例,其部分十进制数与Gray码的一一对应关系如表1所示。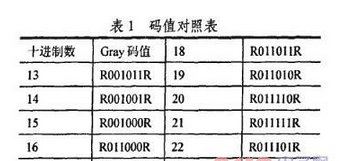
2 磁路结构与识别
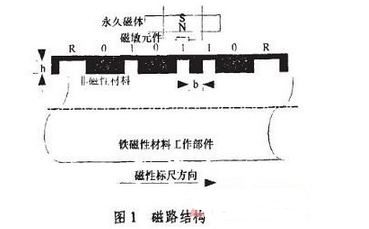
采用图1所示的测量结构,其中被测工作部件要求属于铁磁性材料。文献中指出在固定的磁场中,表面变化的曲率越大,引起的周围磁场,变化也越大。为了使磁场的影响最大,选用凹槽作为测罩标志,以单位宽度(bmm)的凹槽表示“0”或码元间隔,单能宽度的“凸槽”表示“1”,两倍单位宽度的“凸槽”表示标志位R。在工作部件表面,按上述的编码规则加下出一系列凹槽,然后喷涂上非磁性材料,形成磁性标尺。图1所示的磁性标尺表示Gray码01 1010码区,黑色部分表示非磁性材料。
激励磁场采用长方体永久磁体,其磁极赢接对着磁性标尺,使测量出的有效磁场变化范围大。
磁场通过磁性标尺形成通路,磁敏元件测出磁性标八表面变化引起的磁场变化。通过磁路分析和标罩磁位等高线计算发现,磁性标尺的槽深h越人越好,槽宽b应小于3mm。
根据磁敏传感原理,“凹槽”和“凸槽“会导致不同的磁场强度,从而使磁敏元件相应地输出不同的电半信号“0”或“1”,形成数值码,用于确定位移的粗读值;而标志位R码宽两倍于码元“1”宽度的特点,使得识别后的序列出现具有固定特征的标识码,它用于精读数。
3 应用实例
若图1中的“铁磁性材料下作部件”表示液压缸的活塞杆;“非磁性材料”为特制黑色陶瓷,平整地覆盖在活塞杆表面;“磁敏元件”为霍尔元件,它以两个单位宽度为轴向间隔,绕活塞杆环状布置在液压缸前端,轴线与活塞杆一·致,以便尽可能减少活塞杆的角位移和径向位移的影响,精确测出其位置。
取h=3mm;b=2mm,则相邻霍尔元件轴向间距N---4mm,6位编码的每组码区长度L=30mm。
可知,要识别一个完粘的码区必须设置9个霍尔元件,但为了能随时识别出一个完整码区,必须设置16个霍尔元件。以图2所示时刻位置来说明其丁作过程,其中箭头表示霍尔元件,数字为其编号。
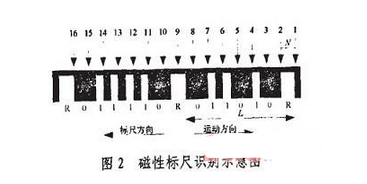
霍尔电路的工作原理是,在外磁场的作用下,当磁感应强度B超过导通工作点时,霍尔电路输出管导通,输出低电-半:若曰值低于释放点时,输出管截止,输出高电半。因此在“凸槽”时钢质活塞杆被磁化,磁感应强度曰增加,霍尔电路导通,输出低电平,用“1”表示;在“凹槽”时输出高电平,用“0”表示。以第1个霍尔元件为测量基准,从图2所示时刻起,位移晕旃次变化b=2mm时,一个码区行程内霍尔电路输出的二进制序列如表2所示。分析可知,序列的标识码为l 0000000 1,其前面或后面6位序列数分别为相邻的两个数值码,这使它具有很强的容错能力。标识码每隔一个霍尔元件间距N在低位部分右移一位。值得注意的是,标识码前面的数值码代表磁性标尺当前检测位置下一个码区的值。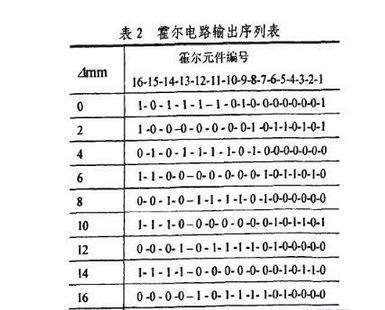
根据霍尔电路识别出的前置数值码,在编码库找到对应的十进制数,假设为x,则磁性标尺行程的粗读数为30×(j,-1)mm:精读数根据标识码l 0 0 0 0 0 0 0 1确定,磁性标尺每左移4mm,标识码则右移一位。若低位不是标识码,则在上一个标识码代表的行程上加2mm。假设标识码右移了a位,则精读数为4xa+b,其中b当尾位为标识码时取0mm,否则取2mm。
综上,液压缸活塞杆的行程读数为S=30(x—1)+4Xa+b此类磁性标尺编码有两人优点:第一,便于找到即时位置的绝对行程值;第二,起校准作用,及时纠正行程计算错误。