1、概述
红外探测传感器由于发出的是红外光,常见光对它的干扰极小,且由于价格便宜,而被广泛应用于智能小车的循线、避障以及其它机器人中物料检测、灰度检测等系统中,图1是利用红外光电管做传感器模块。

图1 红外传感器
市面上的红外传感器一般有两种,一种是集发射和接收于一体的红外对管,一种是发射管和接收管分立的的红外管,分别如下图2和图3所示。


图2 发射接收一体的红外对管 图3分离的红外传感器
2、红外光电管的工作原理
上图中,红外光电管有两种,一种是无色透明的LED,此为发射管,它通电后能够产生人眼不可见红外光,另一部分为黑色的接收部分,它内部的电阻会随着接收到红外光的多少而变化。
无论是一体式还是分离式,其检测原理都相同,由于黑色吸光,当红外发射管照射在黑色物体上时反射回来的光就较少,接收管接收到的红外光就较少,表现为电阻大,通过外接电路就可以读出检测的状态;同理,当照射在白色表面时发射的红外线就比较多,表现为接收管的电阻较小,此时通过外接电路就可以读出另外一种状态,如用电平的高低来描述上面两种现象就会出现高低电平之分,也就是会出现所谓的0和1两种状态,此时再将此送到单片机的I/O口,单片机就可以判断是黑白路面,进而完成相应的功能,如循迹、避障等。
3、检测电路设计
上面介绍了红外光电管检测黑线的基本原理,但光只有红外发射和接收管不行,必须加外部电路才能实现功能,这里我们用到了LM339。LM339为内部集成了四路比较器的集成电路。因为内部的四个比较电路完全相同,这里仅以一路比较电路进行举例。如图4所示为单路比较器组成的红外检测电路图,比较器有两个输入端和一个输出端,两个输入端一个称为同输入端,用“+”号表示,另一个称为反相输入端,用“-”表示。用作比较两个电路时,任意一个输入端加一个固定电压作参考电压(也叫门限电压),另一端则直接接需要比较的信号电压。当“+”端电压高于“-”端电压时,输出正电源电压,当“-”端电压高于“+”端电压时,输出负电源电压(注意,此处所说的正电源电压和负电源电压是指接比较正负极的电压)。

图4 红外对管循迹电路图
下面分4点说明下该原理图的原理
1)、比较器的输出端相当于一只不接集电极电阻的晶体三极管,在使用时输出端到电源端需要接一只电阻(称为上拉电阻,选3-15K)。选用不同阻值的上拉电阻会影响输出端高电位的值,因为当输出晶体管三极管截止时,它的集电极电压基本上取决于上拉电阻的值,一般选10K左右比较合适。
2)、图中R1、R2为限流电阻,不同大小的限流电阻决定了红外发射管的发射功率,R1越小,红发发射管的功率就越大,多个并联后小车的能耗也大幅增加,但同时增加了光电管的探测距离,此处值的大小应根据需要通过实验得到。R2的选择和采用红外接收管的内阻有关,具体的选择只需按照分压的原理进行一下简单的计算就可以。一般在设计时可以加一个发光二极管,照射不同路面时,通过观察发光二极管的亮亮灭来看是否达到想要的效果。
3)、图中R3为分压电阻,为比较器提供参考电压,具体参考电压的设定应根据R2上端的电压来决定,此时一般通过调节此电阻来适应不同的检测路面与高度。
4)在设计时,4、5两端的信号输入位置可以交换,如可以把传感器的信号从比较器的正端送入。只需注意的是两种不同的接法,表现在输出端的电平会出现两种相反的结果,这个根据需要进行设计即可。
5)、最后一点需要注意的是,由于51单片机没有内置AD,所以采用比较器的方式(其实比较器也相当于一个一位AD),对于有的单片机带有AD模块的,我们则可以通过单片机的AD口直接读取电压信号的变化值,不仅可以简化外部电路,同时还能保留红外接收管连续变化电压信号信息,通过软件算法进行位置优化,不仅可以得到更精确的位置信息,还可以消除环境光线的影响,缺点就是加重了软件设计的难度。
4、LM339模块及红外对管模块介绍
图5和实验室设计的红外循迹模块,主要分为两大部分,LM339比较器模块和红外对管模块,由于上面已经分析的其工作原理,下面给出两部分的原理图,如图6、图7所示,具体的原理及接口定义请大家参考此原理图和LM339的资料进行分析。

图5 LM339模块及红外光电管模块
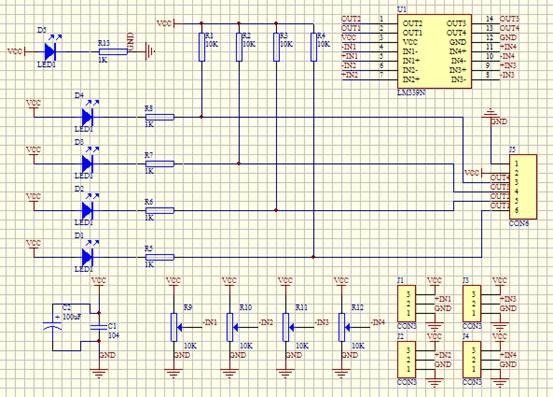
图6 LM339模块原理图
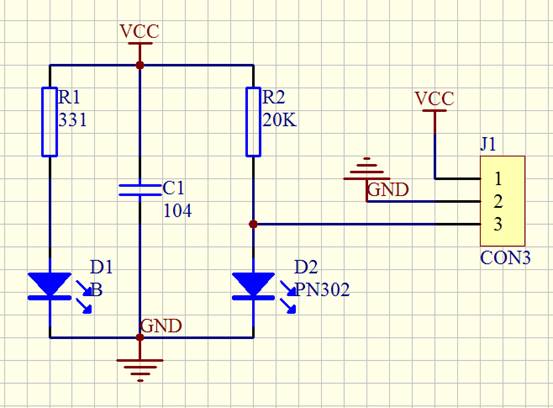
图7 红外循迹原理图
5、红外循迹程序
下面给出一个简单的程序用以实现小车的循迹,为了便于对程序的理解,此处用非PWM的方法写出,即电源电压直接加了电机两端,以固定速度实现循迹。
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//接IN1 控制正转
sbit PWM2=P2^1;//接IN2 控制反转
sbit PWM3=P2^2;//接IN1 控制正转
sbit PWM4=P2^3;//接IN2 控制反转
sbit PWM5=P2^4;//接IN1 控制正转
sbit PWM6=P2^5;//接IN2 控制反转
sbit PWM7=P2^6;//接IN1 控制正转
sbit PWM8=P2^7;//接IN2 控制反转
sbit ss1=P1^0; //左二级
sbit ss2=P1^1; //左一级
void main()
{
while(1)
{
if(ss1==0&&ss2==0)//直走
{
PWM1=1;
PWM2=0;
PWM3=1;
PWM4=0;
PWM5=1;
PWM6=0;
PWM7=1;
PWM8=0;
}
if(ss1==1&&ss2==0)//右边检测到,向右转
{
PWM1=0;
PWM2=0;
PWM3=0;
PWM4=0;
PWM5=1;
PWM6=0;
PWM7=1;
PWM8=0;
}
if(ss1==0&&ss2==1)//左边检测到,向左转
{
PWM1=1;
PWM2=0;
PWM3=1;
PWM4=0;
PWM5=0;
PWM6=0;
PWM7=0;
PWM8=0;
}
}
}