0 引言
同步机正余弦旋转变压器等广泛应用于火力控制,航空航天、自动控制等领域以实现系统间轴角信息的传输,由于计算机技术在上述领域的广泛应用,数字-轴角转换已(Digitalto Shaft-angle Converting,DSC)成为一个重要的问题。市场上DSC集成模块产品价格较高且接口不够灵活,在某些领域应用受到限制,特别在多路DSC使用时效费问题更为突出。基于上述问题,提出一种采用ARM单片机+CPLD实现数字-轴角转换的方法。
1 数字-轴角转换原理
数字-轴角转换(DSC)是将数字形式表示的轴角度θ通过运算电路转换为正余弦旋转变压器形式的电压,经正余弦旋转变压器和经过Scott变压器后驱动同步机指向对应轴角位置,从而完成数字-轴角转换。
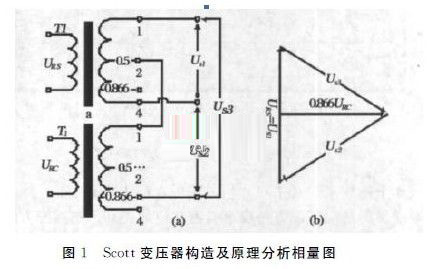
为了将两相正余弦旋转变压器信号变为三相同步机信号,需使用Scott变压器.其基本构造及原理分析如图1所示。
2 硬件设计
2.1 总体设计
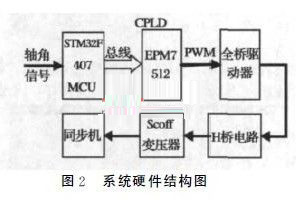
以一路DSC为例,系统的硬件结构如图2所示,工作原理为:STM32F407微控制器为主控芯片,通过通信接口接收外部输入的轴角信号θ,并对其进行粗精分离及利用查表法计算对应占空比大小,通过总线方式将通道对应地址及占空比对应数据信息送入CPLD;CPLD根据数据及地址信息产生对应通道和占空比的PWM 信号;由4个互补MOS管构成的全桥驱动电路由全桥驱动器UBA2032根据PWM 信号控制全桥电路开断,并经选频电路后产生对应轴角的调制波,经Scott变压器转变为三相信号后驱动同步机指向对应轴角位置即完成系统的数字-轴角转换。
2.2 STM32F4微控制器
STM32F4微控制器是由意法半导体生产的基于ARMCortex-M4内核的新型微控制器,性能优越.下面主要说明选用此型号MCU的原因:
(1)内核架构先进,性能优越.由于MCU需要完成诸如轴角粗精分离,取整以及调制波对应PWM 信号占空比等运算,涉及到较多乘除法运算,要求所选MCU需具备较强浮点及乘除运算能力,而所选STM32F4微控制器具有专门的硬件乘法器和具有较高的主频(168MHz),且可适当超频,适合完成较为复杂的实时运算;(2)接口丰富,可方便完成功能扩展.RS232串口用于接收外部信息,同时,此型号MCU具有网络接口,可在系统组网时作为网络节点;(3)可变静态存储控制器(FSMC),是STM32系列采用的一种新型的存储器扩展技术,可根据不同的外部存储器类型通过设置进而匹配信号的速度,达到方便扩展。使用灵活的目的,系统中通过数据/地址/控制三总线方式与CPLD通信。
在多路DSC中,通过地址总线传递所选通道号,数据总线传递对应此通道相应轴角调制波的PWM 信号的占空比,控制总线传递相应控制信号。
3 软件设计
系统主要分为轴角粗精角度分离取整,占空比计算以及PWM 信号生成三部分。
3.1 轴角粗精分离设粗精同步机系统表示的轴角为θ,根据粗精传动比例k将其分为精确同步机轴角度θ精和概略同步机轴角度θ粗,这一过程称为轴角粗精角度分离。
3.2 查表法计算占空比根据公式(1),以正弦调制波为例,其输出式子为:
URS = KRUmsinωtsinθ,PWM 波形频率为f1 =20kHz,DSC角度更新速率为f2 =50Hz,因此在每个调制波周期内有N1 =f1/f2=400个PWM信号.CPLD采用时钟计数.CPLD采用时钟计数方法产生不同占空比的PWM 信号,由于CPLD的时钟频率为f3 =32.768 MHz,因此产生20kHz的PWM 信号时,最大计数值为N2 =f3/f1=1638,以中间数值为零值点,即为Z0 =819。
4结束语
设计了一种以ARM Cortex-M4内核的新型STM32F4微控制器和可编程逻辑器件CPLD为核心的数字-轴角转换系统。利用PWM信号控制全桥桥电路提供大功率输出,进而驱动同步机指向对应轴角,经高炮系统控制实验验证,该系统运转平稳,效率高,改进了原系统功耗较高,发热量大的缺点,且具有较高精度及效费比,实测静态转换误差小于0.5密位(20:1粗精组合),达到实际要求,为其它数字-轴角转换系统实现提供了一种新的方法,具有一定推广价值。