引 言
整流器作为一种AC/DC变换装置,其发展经历了由不可控整流器(二极管整流)、相控整流器(晶闸管整流)到PWM整流器(门极可关断功率开关管)的发展历程。晶闸管相控整流和二极管不可控整流对电网谐波污染严重,且网侧功率因数低。PWM整流器已对传统的相控及二极管整流器进行了全面的改进。TMS320LF2407具有快速的数据处理能力和丰富的硬件资源,作为控制芯片可以提高系统的实时响应能力和控制精度,已经被广泛应用于电气自动化控制的各个领域。
1 总体设计及硬件电路
图1为PWM整流器系统硬件框图。在这个系统中,TMS320LF2407为数字控制芯片,整流器采用SVPWM控制策略。系统硬件由主电路、直流电压检测电路、交流侧输入电流检测电路、过零检测电路和保护电路等组成。DSP采集直流电压检测电路检测的电压值和交流电流检测电路检测的电流值,通过SVPWM控制算法,产生6路PWM脉冲通过驱动模块去控制整流桥功率管的导通和关断。当发生故障时,DSP封锁PWM输出。

1.1 主电路
图2为三相PWM整流桥主电路,包括交流侧的电感、电阻、直流输出电容,以及由全控开关器件和续流二极管组成的三相半桥电路。ua、ub、uc为电源电压,L为交流侧滤波电感,主要作用为隔离电网电动势与交流侧电压,滤除交流侧PWM谐波电流,实现PWM整流器交流侧正弦波电流控制。
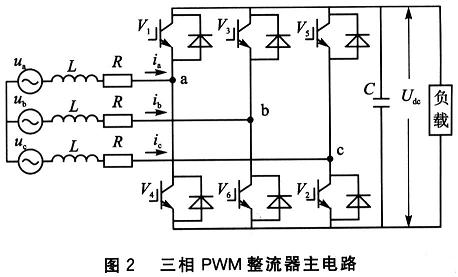
电阻R为滤波电感L的等效电阻和功率开关管损耗等效电阻的合并,C为直流侧支撑电容,其主要作用为缓冲三相电压型PWM整流器交流侧与直流负载间的能量交换,且稳定VSR直流侧电压,抑制直流侧谐波电压。
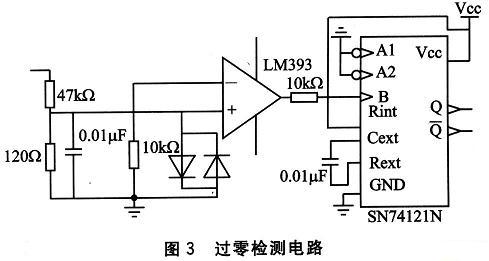
1.2 过零检测电路
过零检测电路如图3所示。过零触发电路的作用是根据相电压的过零点来鉴别系统所处的区间,通过过零触发脉冲使系统软件产生中断来调用相应的控制脉冲计算程序。电压经过电阻分压和滤波,通过LM393构成的过零比较电路得到与电网输入相电压信号同步的方波信号,经过SN74121N变成和方波同步的触发脉冲,随后被送到DSP控制芯片的捕获接口,用来产生边沿捕获信号以触发相应的中断,从而调用相应的中断服务子程序。
2 软件设计
空间矢量PWM(SVPWM)控制策略是依据变流器空间电压(电流)矢量切换来控制变流器的一种思路新颖的控制策略。SVPWM具有电压利用率高、动态响应快等优点,另外,简单的矢量模式切换更易于单片微处理器实现。根据空间矢量的控制原理,三相对称的整流器开关输入电压可视作一个空间电压矢量V来处理,利用整流器8个基本电压空间矢量V0~V7的不同组合合成幅值相同、相位不同的空间电压矢量V。区间划分与基本电压空间矢量之间的关系如图4所示。
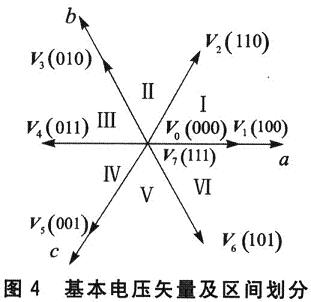
假设电压空间矢量V在I区间,那么需要基本电压矢量V1、V2、V0/7共同作用来合成。依据平行四边形法则,有

T1、T2分别为矢量V1、V2在一个开关周期中的持续时间;Ts为PWM开关周期。令零矢量V0/7的持续时间为T0/7,则
![]()
令V与V1间的夹角为θ,又因|V1|=|V2|=2Udc/3,可得

其中Udc为输出直流电压。
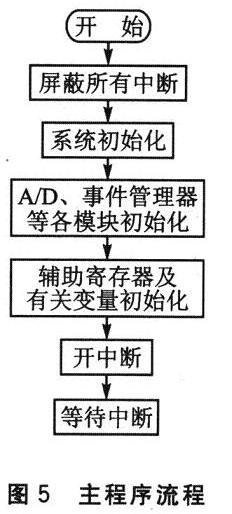
本系统软件设计包括主程序、中断服务子程序、电压滞环模块、电压外环PI调节模块、数字电流环PI调节模块、扇区判断子程序和SVPWM产生子程序等。图5为主程序流程,图6为中断服务程序流程。主程序主要完成DSP控制器的系统初始化,模数转换模块、事件管理器模块等相关控制寄存器的初始化,系统中控制用的状态变量的初始化。在中断程序中,通过调用一些子程序模块,完成相应的控制算法,输出PWM控制脉冲等。

3 实验结果
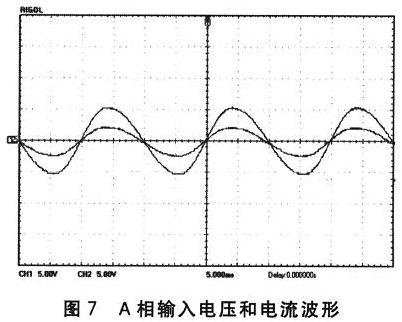
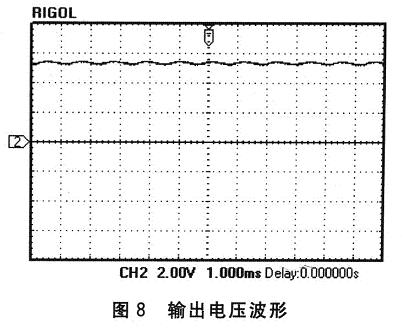
搭建了11KVA整流实验样机硬件平台,输入三相电压有效值为220 V,频率为50Hz。图7为A相输入电压和电流波形,可以看出输入电流波形呈正弦化,电源电压和输入交流电流同相位,基本实现了单位功率因数整流。图8为输出直流电压波形,可以看出输出直流电压比较平滑,脉动小,基本稳定在620 V。图9为同一桥臂上下功率管PWM波形,为了防止上下管同时导通,设置了5μs的死区。

结 语
本系统采用了TMS320LF2407DSP控制芯片,简化了系统的硬件结构,提高了系统的实时性和可靠性。三相PWM整流器采用SVPWM控制,提高了电压的利用率。简单的空间矢量切换模式更易于单片微处理器实现,可以使网侧电流正弦化,基本实现单位功率因数整流。本系统对实际工程应用有一定的指导意义。