1 引言
震动信号分析作为战场传感侦察系统的一个重要组成部分,主要探测地面运动目标的震动信号,对其信号实时分析和处理,并给出相应的识别信号,以判别震动目标类型、数量等信息。为了得到良好的震动信号,并能初步分析处理该信号,给出了一种基于DSP信号的实时震动信号分析处理系统设计方案。
2 系统硬件设计
2.1 震动传感器信号检测单元设计
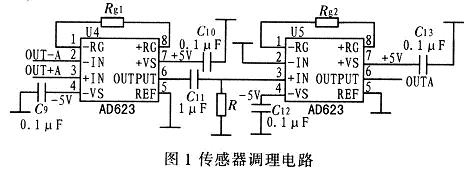
系统传感器采用EG& GICSENSORS公司的3028型加速度传感器。由于该传感器的输出为差分输出,所以采用一个仪表放大器将其差分输出转换为单输出;又由于该传感器具有 16.8 mV的零位输出电压,因此第1级放大倍数应尽可能小,目标震动信号叠加在放大的零输出电压上可能产生饱和失真,即可能被削顶,因此Rg1应取得大一些。在此Rg1=10 MΩ,这样第1级放大倍数G1≈1,于是传感器的零输出电压几乎未放大,目标震动信号不至于由于其零输出电压的影响而失真。由于第1级放大电路的仪表放大器的输出信号中仍叠加有传感器的零位输出电压,该电压为直流或接近于直流的信号,为避免其在后续电路中被放大,在第2级放大电路前需加一个高通滤波电路隔离该信号。在此用RC二阶高通滤波器消除零输出电压对后续目标信号放大的影响。这里选取R=36 kΩ,C=1μF,则此高通滤波器的截止频率为:

第2级REF接1.5 V参考电压,调节Rg2使输出信号在满量程时的输出范围在0~3 V之内,以便DSP的A/D转换器采集数据,传感器的调理电路如图1所示。
2.2 DSP单元设计
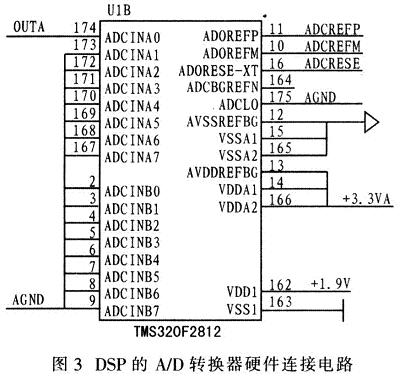
数字信号处理器采用TI公司的TMS320F2812,该器件是一款用于控制的高性能、多功能、高性价比的32位定点DSP,最高可在150 MHz主频下工作,可兼顾控制和快速运算的双重功能。数据存储模块采用一个8 MB的串口FlashM25P80。
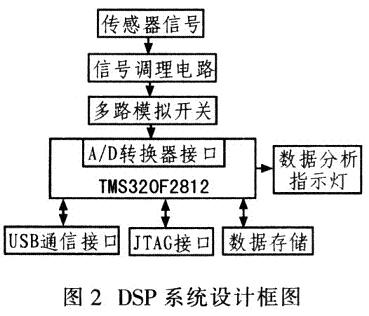
DSP实时震动信号分析和处理系统主要由震动传感器、前置放大电路、滤波电路、DSP数据采集分析模块以及存储模块组成。图2为系统设计框图。
3 系统软件设计
3.1 信号采集预处理
信号采集后为了能够在DSP中快速处理,需要进行去均值与归一化,这样可有效限制信号幅值,并将信号统一到同一数量级。有助于计算开方时需要利用解一元二次方程的算法;计算除法时,为了减少机器周期的占用,需要将除法转换为乘法。去均值与归一化处理的计算方法可参见文献。
3.2 程序流程
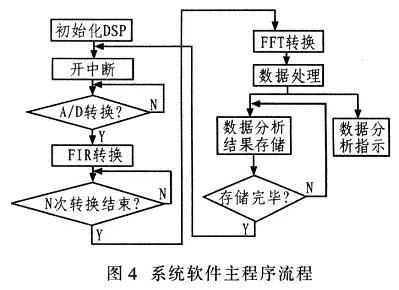
图4为系统软件主程序流程。首先对系统初始化,看门狗定时复位,启动A/D转换器采集数据,主程序进入死循环;当A/D转换器转换完毕,进入中断子程序,读取数据,并将数据存人数组进行数据的处理和缓存。
3.3 DSP主程序设计
主程序先初始化系统控制寄存器,初始化PIE向量表禁止和清除所有CPU中断,采用TMS320F2812片内集成的A/D转换器采集数据。程序首先对 A/D转换器初始化,用DSP内的EVA事件管理器产生SEQ1A/D转换启动信号,首先设置T1比较值为0x0080,设置周期寄存器为0xFFFF使能事件管理器A的EVASOC,使能定时器1比较递增计数模式,DSP事件管理器EVA的配置程序如下:
EVA为SEQ1产生ADC SOC信号后,开始对通道1转换,转换结束后,A/D转换产生中断信号并调用中断处理程序读取ADCRESULTO中的值存人数组。当采满512个点后将程序跳转到数据处理程序,调用FIR和FFT子程序,其中DSP A/D转换器初始化程序代码为:
DSP整个系统软件采用C语言和汇编语言混合编程,中断函数模块用汇编语言,可提高程序的效率,FFT和FIR数字滤波运算主体用混编语言编写,可从TI网站下载。
4 实验结果
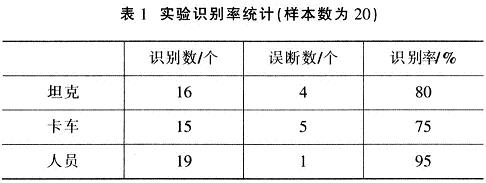
为了检验系统的实际应用能力,将该系统在震动台上进行实验,将3028型传感器固定在激震台上,用激震台分别模拟坦克、卡车和人员3种震动信号,这3种信号各取20组用于该系统实验,根据实验输出信号判断识别的正确率,在震动台达到稳定后DSP的解算时间均小于1 s。DSP解算识别结果如表1所示。
5 结论
由实验结果看出,该系统能够对目标的识别起到一定的辅助分析作用,系统解算时间均小于1 s,达到实时分析要求,系统能够较好分析人员产生的震动信号,而对坦克和车辆产生的震动信号分析结果较差,这主要是由于坦克和车辆产生的震动信号特征较为相似,单纯从震动信号的频率和强度区分难度较大;另外由于震动台是磁激励式的,对外有较强的电磁辐射,会对整个系统产生干扰,因此,后续实验需采取屏蔽电磁干扰的措施,震动信号分析算法还需进一步提高。