0 引 言
铁路车辆红外线轴温探测技术是近二、三十年发展起来的一门新技术,主要应用在防止客货列车燃切轴事故上,特别是20世纪90年代发展起来二代机轴温探测技术是一门集工程控制、信息网络及自动化控制的新兴技术,它对防止客货列车燃切轴事故,保证行车安全起到了重要的作用。
红外线轴温探测二代机技术主要是将各个探测站采集到的轴温数据进行热轴判别和处理后,通过电务通道上传至信息监测中心和查询终端,其中计算机完成的主要功能是对轴温探测流水数据、热轴流水数据的处理,但随着红外技术的不断发展和红外管理工作的进一步规范,特别是随着红外线在保证铁路行车安全的作用和地位的提高,如何及时快速处理红外设备故障以及快速准确判断红外设备故障,成为目前红外工作的重要组成部分,仅仅通过对轴温探测的流水数据进行分析来判断故障已经远远不能满足红外管理运用工作的需求,必须将相关的红外设备故障通过故障报警系统自动判别后通知相关人员进行快速处理。
1 概述
在铁路安全运输工作中,红外线探测设备的故障判别及处理在红外管理占有非常重要的地位,长期以来,红外故障判别和处理主要以人工分析方式为主,存在着红外设备使用率降低等弊端。随着红外工作的进一步规范和强化,实现红外设备故障报警以及控制自动化,从人控转变为机控已成为红外故障处理的必然趋势。
红外线设备远程报警系统,是利用现有的电话网红外线设备复位,可实现对红外线设备的无人检测远程报警,远程控制红外线设备,机房热分机启动等,以保证红外线设备的正常工作,该设备极大地提高了红外线设备运行的安全性、可靠性及设备故障的及时性,极大地提高了行车保安设备的安全性。
2 本系统主要完成功能
红外线远程智能远程报警系统是采用单片机控制实现远程报警,与图像监控等手段相结合,能够准确快速地实现远程故障报警,系统拓扑图如图1所示。本系统由两部分组成:红外线探测点和车辆段监控系统。
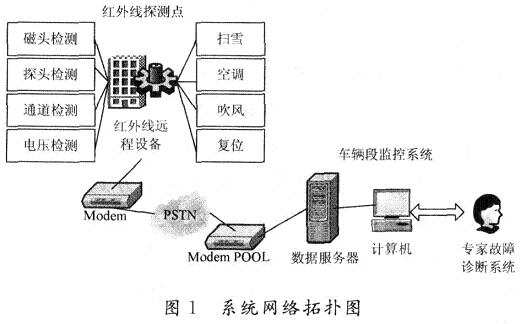
红外线探测点由单片机及Modem拨号,短距离无线通讯等部分组成,在系统满足可靠性和通用性的前提下,红外线探测点应实现以下几个方面的故障报警自动化。
(1)对红外设备的磁头故障(包括磁头损坏、丢失、磁头磁性不稳定等)进行自动远程报警。
(2)对主辅机的通讯故障(不接车)进行自动报警,若为设备死机造成的故障,可进行远程控制设备复位。
(3)对红外中心通讯故障或停电故障进行自动远程报警。
(4)可对附加的其他设备的工作或关闭进行远程控制(如电扇、空调、扫雪器等)。
(5)人员安全报警,当检修人员在探测点进行检测时,对火车接近进行报警,可保证检测人员人身安全。
(6)对房屋内人员的非法入侵进行自动远程报警。
(7)采用摄像拍摄的方法进行监控,具有动态检测进行报警功能,可实现人员入侵动态报警功能,考虑电话传输速度较慢,大量视频图像暂存于当地,检查人员使用U盘可将数据导出。
车辆段监控系统由服务器、Modem Pool、监控LED显示等部分组成。
主要完成对红外线探测点故障信号监控、红外线故障信息导入铁道部红外线段级红外线信息平台,存储、打印、显示等功能。
3 主要实现方案
红外线设备远程报警系统能实时监测红外线设备的工作状况,并通过安装在红外线设备机房的电话线把其数据传送到车辆段中心电脑上,也可在任何有电话的地方用一台电脑接收这些数据,系统独立工作,不影响红外线设备工作,即使系统不工作(故障)也不会影红外线设备工作。
3.1 主控制模块
主控制模块由信道检测、静态卡、传感器、液晶及电源组成,主要实现功能:
(1)实时接收各种模块的数据;
(2)能通过64×128液晶点阵显示各模块状态和数据,保存维修人员编码;
(3)与上级通过MODEM交换数据;
(4)侦听主、辅机之间的大列波形。
存贮和显示数据,主要包括最近14列车的大列波形;一日的信道状态;三日的供电状态,异常复位;一日探头供电箱,及辅机的各种电压值;近5日环温、箱温情况;近30日防盗、维修人员访问情况;近30日探头位置;最近14列车的1#、2#、3#磁头的平均值、最大值、最小值和噪声;探头定标值;近4日停电情况。系统构成如图2所示。
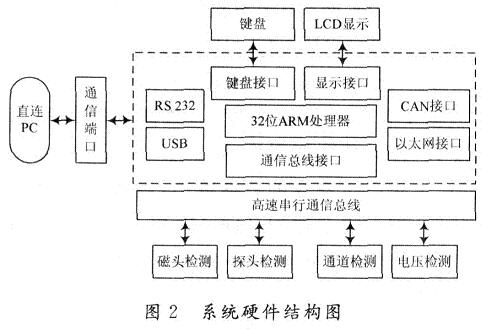
系统采用嵌入式控制器32位ARM结构微处理器,外围扩展存储器接口,液晶显示、键盘作为人机交互接口,通过RS 232和USB与PC机进行通讯,嵌入式控制器可支持工业现场总线、以太网两种网络结构。嵌入式控制器采用基于μC/OSⅡ内核的RTOS操作系统。
3.2 探头检测模块
这部分模块主要目标是检测探头大列波形;定标值以及探头位置;检测探头供电箱,及辅机的各种电压;检测磁头状态;检测供电、上电、掉电、异常复位;检测探测站与中心的信道状态及环温、箱温等情况。采集二路下探波形,64点采样,采集密度一样,采集长度增加一倍,即提前半个轴箱开始,延后半个轴箱结束;通过RS 485口上传主机探头位置,对于检测红外线设备轴温是否正常具有决定性意义,由于轴温探测设备安装在铁轨旁边,由于震动等原因,经常发生偏转,导致红外线设备检测波形不正确,探测轴温出现偏差,传统检测方法是采用三角尺测量,用香头在三角尺上放置热源,对比红外线探头波形校准,这种方法测量复杂,精确度较低。
采用电子罗盘可较好地解决这个问题,电子罗盘是测量方位角(航向角)比较经济的一种仪器,本系统采用TDCM3电子罗盘传感器模块,TDCM3电子罗盘由美国Precision Navigation生产。模块封装了一个三轴磁强计和一个高性能的两轴倾斜计,可以同时输出俯仰和滚动角,以及三维的磁场测量值。以前所有的罗盘都必须保持水平才能保证精度,因而只能采用一种笨拙的万向节,或再加上液体的方法来保持传感器的水平状态。TDCM3则使用了一个高性能的倾斜计(倾斜传感器),允许微处理器在数学上改正倾斜角,因此,它是一种消除了机械常平架的电子罗盘。TDCM3电子罗盘对水平方向的角度测量为360°,同时,按照可测量倾斜角度范围,又分为20°,50°,80°。电子罗盘的数据输出可以是RS 232或RS 485标准的数据字符输出或者模拟输出,并且可以由主控计算机发出控制指令,来控制TD—CM3电子罗盘输出数据的种类、格式以及工作方式。
完整的TDCM3电子罗盘的数据输出为:
$C<compass>P<pitch>R<roll>X<Bx>Y<By>Z<Bz>T<temp>E<error code>校验和<cr><1f>
数据中包含有罗盘角度C,载体的倾斜角P和横滚角度R,各向的磁场强度X,Y,Z,在开始校准好探头位置后,记录电子罗盘的数据输出,当俯仰角、方位角发生变化时,根据需要取用TDCM3电子罗盘提供的数据进行对比。如果变化超过一定范围,表明探头发生偏转,需要再次校准。
3.3 磁头波形电压检测模块
这部分模块主要目标是采集3路磁头波形,在触发处的位置需要保存,采集结果通过RS 485口与主机通讯。电压检测模块检测27路模拟电压;220V,交流值;异常复位。采集电压原理图如图3所示。
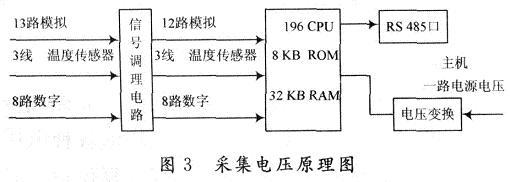
检测内容如下:
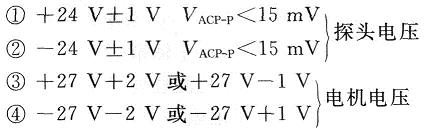
⑤2x背温输出:3.33—2.33 V
⑥2x保护门电压:±27 V
⑦2x探头噪声和峰值(在自检时采集):Vp-p<25 mV
3.4 数据传输模块
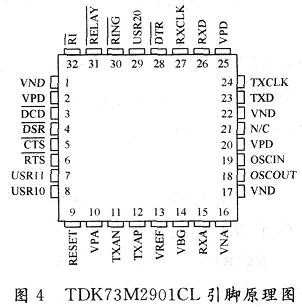
系统在红外线探测点将数据通过MODEM发送至车辆段监控中心,中心计算机对数据可实时监控,根据红外线设备检修方法,可对红外线设备进行远端维护。数据传送主要采用TDK公司的TDK73M2901CL,它是一种高集成度的单片MODEM芯片,该芯片可以和8048或80C51单片机对接,接口电路简单;采用串行口数据传输;既可以同步方式又可以异步方式工作,包括V.22扩充超速;与CCITT V.22,V.21,BELL 212A,103标准兼容;具有呼叫进程、载波、应答音、长回环检测的功能。TDK73M2901CL具有32DIP封装,其引脚见图4。
TDK73M2901CL内部有4个寄存器可用于控制和状态的监视。其中,控制寄存器CR0用于控制电话线路上数据传输的方式;控制寄存器CRl用于控制TDK73M2901CL内部状态与单片机之间的接口;检测寄存器DR是一个只读寄存器,它提供了监视MODEM工作状态的条件;音调寄存器TR则用于控制音频信号的产生,在TR的控制下,MODEM可以产生DTMF信号、应答音信号和防卫音信号,还可以在MODEM启动和与对方联系过程中对RXD引脚进行控制。
寄存器名称、地址、数据位如下:AD2~ADO D7D6 D5 D4 D3 D2 D1 D0,控制寄存器CR0地址000,调制选择:O发送模式,其中:1100=FSK模式,包括发送允许、应答、始发模式;控制寄存器CRl地址001,数据发送方式:允许中断,包括旁路编码、时钟控制、复位操作、测试模式,其中:00=正常;检测寄存器DR地址010,包括接收数据、介码标志、载波检测、应答音、呼叫过程、长环检测等模式;若条件检测到为“1”,否则为“0”;音调控制寄存器TR,地址011,控制RDX包括发防卫音、发应答音、发送DTMF音模式,该四位对应1~16 DTMF信号。
接收端的MODEM按应答方式接线,单片机89C51平时处于巡回检测电话振铃信号的状态,一旦检测到该信号,则可将J2吸合,在2 s左右的沉默之后,启动MODEM发送应答音。双方经过简短的握手过程之后,89C51便将收到的对方代码存储至数据服务器。在发送完DTMF(拨号信号)之后,程序需要检测应答音、发送和接收握手信号、循环发送本机代码等内容。双方所用的通信程序框图见图5。

4 实验及测试结果
系统设计完成后,可脱机值守方式工作,122×32点阵LCD可实时显示时钟、操作状态,并具有15键操作键盘,可独立完成故障检测及查询等功能(外形尺寸:255 mm(高)×176 mm(宽)×100 mm(厚)),提供RS 232/RS 485,RJ45接口,支持局域网连接;提供识别记录的标准数据格式。
主要技术参数:
(1)通讯报警时间:5 min;
(2)1#,2#,3#磁头报警时间:有过车时,4 min;
(3)检测车辆速度范围:3~200 km/h;
(4)复位时间,3 s左右。
(5)1#,2#,热分机接通时间大于2 min;
(6)预留控制接通时间,大于2 min。
为验证系统性能,在测试点安装红外线设备远程报警系统,经过大量实验,该系统共预报设备故障302起,其中停电276起,与中心通讯故障9起(通讯部门通道问题8起,主机死机1起),不接车或漏接车故障4起,保护门故障10起(其中异物遮挡8起),2#,3#磁头故障6起,主副机通信故障1起,预报准确率达到100%,指挥中心的值班员和维修工的劳动强度大大降低,预报故障准确率提高。以往红外指挥中心人员根据经验,由于没有现场监测信息,判断故障准确率低,维修工人得到故障通知后,分析判断缺乏依据,经常发生所带板件与故障点不符的情况,加上交通不便,故障处理起来就比较困难。使用红外线远程监控测试仪后,错报的故障几乎没有,使得维修工人可以根据准确的故障预报,及时携带相关板件处理故障,设备的停机时间大幅度减少。该系统为压缩故障延时和及时处理故障提供了帮助,而且由于死机、雪堵、结冰等故障可以远程控制排除,几乎不影响探测站设备正常工作。