文章先通过阐述变频调速系统的基本构成、SVPWM算法的基本原理、参数计算以及实现方法,然后给出SVPWM算法在DSP2407上实现的具体计算过程,最后经过试验,验证整套系统能够正常并准确工作。同时基于MATLAB/Simulink设计了仿真模型进行算法仿真,仿真波形与理论基本相符,证实了该方案的可行性。
1.引言
随着新型电力电子器件的不断更新,变频调速技术得到了极大的发展,经过半个多世纪的发展、丰富和完善,变频调速技术已经成为应用最为广泛的调速方式。
然而传统的SPWM技术存在一些缺点,SPWM技术着重在使逆变器输出的电压尽量接近于正弦波,但电动机需要的是在气隙中形成圆形旋转磁场,产生恒定的转矩,这些是SPWM技术不易做到的,而SVPWM技术是把逆变器和电机作为一个整体来考虑,控制电压空间矢量,使电机获得幅值恒定的圆形旋转磁场,旋转转矩平稳,逆变器输出谐波小,谐波损耗小,因此它的应用日益广泛。
2.系统总体结构
变频调速系统由变频器、电动机和控制系统三大部分构成,有时还包括负载。总体结构如下图1所示。

变频器是一个能改变频率的交流电源。控制系用主要由控制器和电流、转速等检测仪器组成,用于按照给定指令,调节电动机的转速和控制电动机的转矩,完成传动任务。电动机主要是异步电动机,少数场合使用同步电动机。负载即各类工作机械、设备,用于完成各种生产任务。
3.SVPWM算法原理与实现
SVPWM的工作原理是将逆变器和电动机看成一个整体,依据电机磁链和电压的关系,用8个基本电压矢量合成期望的输出电压矢量,实现交流电动机变频调速。
3.1 两电平逆变器
一般低压逆变器的输入为一个单一的直流电源,当对此恒定的直流电压进行脉宽调制,输出为幅值一定的PWM波。如果设直流电压为,以低压节点为零电位,经过逆变器得到的一定的PWM波只有两个电平,即和0,因此这种逆变器称为两电平逆变器,如图2所示:
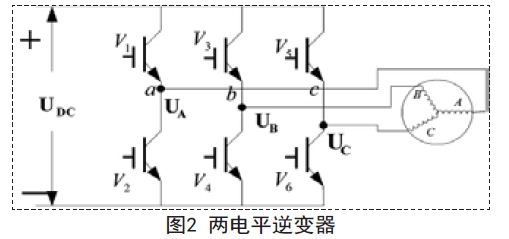
逆变器用6个IGBT(绝缘栅双极性晶体管)V1-V6构成三相逆变桥,V1、V3、V5为共阳极组,V2、V4、V6为共阴极组,每个桥臂2个IGBT串联,从连接点引出三相接线,把一个周期分为360°,将V1-V6以相隔60°的电角度依次导通,每个IGBT导通180°。任一时刻有三个IGBT导通,同桥臂的另一个IGBT必须关断,这样工作逆变器可以对三相负载输出三相交流电。
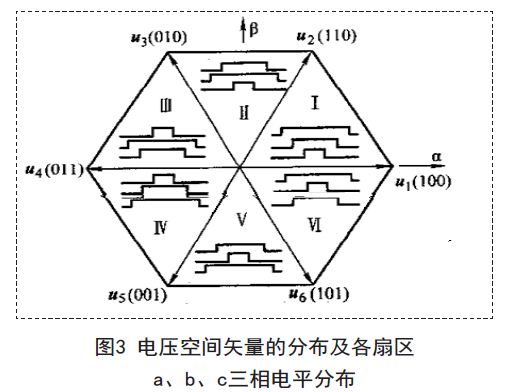
一般情况下两电平逆变器六拍运行时,每隔60°切换一次,共有8种开关状态,按a、b、c相序可表示为100、110、010、011、001、101、000、111.每一种开关状态输出合成电压空间矢量out u 分别记为u1、u2、u3、u4、u5、u6、u0、u7,统称为基本矢量,其中u1-u6为有输出数值的矢量,称为非零矢量,u0、u7无电压输出,称为零矢量。8个电压矢量的空间分布如上图3所示,各矢量之间可分为六个扇区(Ⅰ-Ⅵ),电压矢量若按逆时针方向切换使电动机正转,若按顺时针方向切换使电动机反转。

3.2 SVPWM算法实现
通常来说,SVPWM算法的实现主要分一下几步:
计算电压矢量out U 所在扇区。
计算out U 所在扇区起始矢量和终止矢量的作用时间T1、T2.
通过T1、T2计算各扇区调制波形三相导通时间。
3.2.1 计算电压矢量所在扇区
( 1 )首先将电压矢量out U 分解到α、β轴上,α轴上分量为á u 、β轴上分量为 u ,计算参考值 ref 1 U 、 ref 2 U 、 ref 3 U :
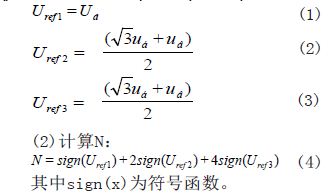
(3)通过N的数值从表1中查出矢量out u所在扇区#1
通过以上3个步骤可以确定出合成电压矢量所在的扇区。
3.2.2 计算Uout所在扇区起始矢量和
终止矢量的作用时间T1、T2当确定合成电压矢量所在扇区之后,设该扇区起始矢量作用时间为T1,截止矢量作用时间为T2.

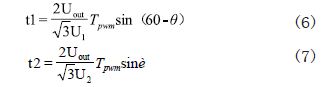
如图4所示U1和U2表示相邻的两个基本电压空间矢量,Uout表示输出电压矢量,其幅值代表电压矢量的幅值,其旋转角速度代表正弦电压的角频率,Uout可由U1和U2合成,即:

根据正弦定理可得:
计算出t1、t2后还需要加入零矢量来调节矢量作用的总时间,使得矢量旋转的角速度等于给定的角速度。要注意的是,零矢量的加入一般要放在程序的开始或结束阶段,这样可以防止电压跳变。
值得注意的是,当运行的电机突然加、减速时,系统的电压矢量Uout可能会超过逆变器输出的最大电压矢量值,这种情况称为过调制。为了避免过调制,我们需要对电压矢量的作用时间做出修正,首先我们要计算出t1、t2的和是否大于Tpwm,若t1、t2的和大于Tpwm,则我们计算修正值,设修正后的起始矢量和终止矢量的作用时间为t11、t22,有:

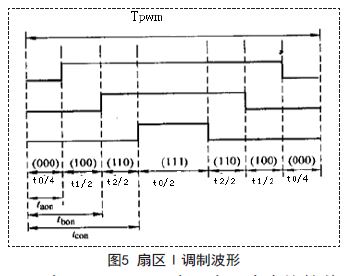
3.2.3 通过T1、T2计算各扇区调制波形三相导通时间
以第一扇区为例,第一扇区的起始矢量为100,作用时间为t1,终止矢量为110,作用时间为t2,加入零矢量,作用时间为t0,每次切换应该只有一个开关动作,如图5所示:
在TMS320F2407中,有三个全比较单元,可生成6路PWM波。包括1个计数寄存器和三个比较寄存器,3个比较寄存器分别为CMPR1、CMPR2、CMPR3.计数器采用连续递增递减模式计数,当计数器在0到计数周期这段增计数周期内,计数器的值与比较寄存器的值相等时,输出电平发生一次跳变;在计数器达到计数周期时,计数器将开始减计数,当计数器再次与比较寄存器相等时,输出电平再次跳变。所以需要将计算出的aon t 、bon t 、con t 的值分别付给CMPR1、CMPR2、CMPR3.通过不断改变比较寄存器的值,得到不同占空比的PWM信号输出控制IGBT的导通与关断,实现对电机的矢量控制。
4.结语
本文提出了一套基于TMS320F2407芯片的变频调速技术的设计方案,该方案中的硬件平台以DSP为核心,系统中采用SVPWM算法来实现变频调速。先通过阐述变频调速系统的基本构成、SVPWM算法的基本原理、参数计算以及实现方法,然后给出SVPWM算法在DSP2407上实现的具体计算过程,最后经过试验,验证整套系统能够正常并准确工作,从而证实了该方案的实用性。