1 概述
将功能强大的嵌入式微处理器( 本文选用LPC2214 ) 系统引入UPS ,可以增强UPS 的功能,使其具有网络化、智能化的特性,满足许多无人职守基站的用电要求。用数字控制代替模拟控制,可以消除温漂、老化等模拟器件存在的问题;抗干扰能力强,有利于参数整定和调节;通用性强,便于通过改变程序软件方便地调整方案和实现多种新型控制策略;同时高度集成的数字电路可以减少元件数目,简化硬件结构,降低开发成本,并提高系统的可靠性。
2 系统硬件设计
无论市电正常与否,在线式UPS 电源的逆变部分始终处于工作状态。逆变器提供稳压和调节功能,对电网供电起到“净化”作用,同时具有过载保护功能和较强的抗干扰能力,供电质量稳定可靠,在各种拓扑和配置结构的UPS 类型中使用较为普遍。因此本文设计方案采用三阶转换的拓扑结构,即AC-DC-AC 。
2 .1 系统组成及工作原理
系统结构框图如图1 所示。当市电正常时,市电输入UPS 经滤波、PFC 后,升压到400 V 直流电;再经过逆变器逆变成220 V 交流电,输向负载;同时400 V 直流电经过Buck 降压电路降压后给电池充电。当市电断电后,电池经Boost 拓扑升压电路给总线供电,然后逆变成220 V 交流电。LPC2214 的A /D 模块采集各个点的工作信息,主控芯片对数据进行分析,依据设定的参数进行判断,作出相应的变化,并将生成的相关记录信息存储到NANDFlash 中。远程接口通过网络与上位机连接,用户可以在监控中心进行相关设定和远程控制。

2 .2 ARM 主控模块及驱动电路
LPC2214 是支持实时仿真和跟踪的16 /32 位ARM7TDMI-S CPU 微控制器。它带有256 KB 的高速Flash 存储器,128 位宽度的存储器接口和独特的加速结构使32 位代码能够在最高时钟频率下运行;拥有丰富的外围接口,如A /D 转换器、PWM 单元、32 位定时器、向量中断控制器、串口、I 2C 接口等,可以简化硬件电路的设计,诸如A /D 采集、PWM 调制电路等;内部时钟频率可达60 MHz ,A /D 转换时间低至2 .44 μs ,完全可以满足日益提高的UPS 工作频率和功能要求。PFC 、DC /DC 、DC /AC 是系统中主要的能量转换部分。DC /DC 部分包括Buck 电池充电电路、Boost 电池升压电路。所有的PWM 控制由单一的LPC2214 完成。
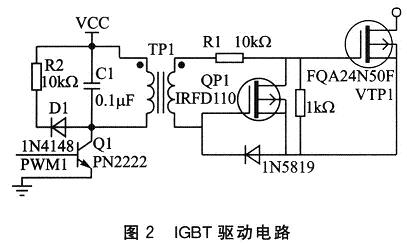
LPC2214 有6 路PWM 输出,通过对功能寄存器的配置,可设定占空比的大小和定时频率的高低;实现6 路单边沿控制或3 路双边沿控制的PWM 输出,或这两种类型的混合输出;具有双缓冲功能,满足系统设计要求。PWM1 、PWIVE 驱动PFC ,PWM3 驱动Buck 电池充电电路,PWM4 驱动Boost 电池升压电路,PWM5 、PwM6 驱动逆变电路。由于LPC2214 的I /O 引脚输出能力微弱,需要驱动电路驱动MOSFET 功率管。驱动电路采用间接式磁隔离电压型驱动电路。LPC2214 驱动PN2222(Q1) 。当输出高电平时,Q1 导通,VCC 电压加在TP1 初级,次级获得感应电压,此时电压通过R1 对VTP1 栅极充电,使其导通。当LPC2214 输出低电平时,Q1 关断,变压器TP1 初级线圈由于电感的作用继续阻碍电流的变化,产生感应电势,使Q1 的集电压升高。D1 、R2 和C1 组成吸收电路,将产生的感应电动势吸收消耗,避免电压升高击穿Q1 。变压器的次级也产生感应电势,QP1 导通,使VTP1 的栅极存储电荷通过QP1 释放,加速VTP1 的关断。IGBT 驱动电路如图2 所示。
2 .3 采样与A /D 模块
采集电路采集输入电网的电压、输入电流、输出电压、输出电流、电池电压、充电电流、放电电流等。LPC2214 根据采集到的数据进行运算,控制PWM 的占空比变化,使其输出对应的方波。LPC2214 的A /D 模块是19 位逐次逼近式模/数转换器,测量范围为0 ~3 V ,一个或多个输入的Burst 转换模式;基本时钟由VPB 时钟模式,可编程分频器可将时钟调整至逐步逼近转换所需的4 .5 MHz 。电压信号采集分为交流电压取样和直流电压取样两种电路。交流电压的信号经电阻分压为-1 .5 ~+1 .5 V 的信号。通过运算放大电路加负电压偏置,将采样信号平移到0 ~3 V 的范围内,满足A /D 的采集范围。直流电压信号( 如400 V 总线) 和电池电压经分压电路降压后,直接进入A /D 转换器的采集端。
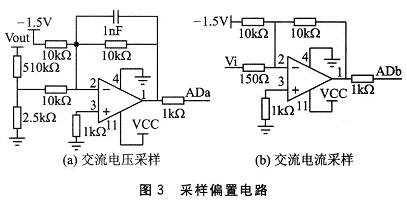
电流信号同样分交流电流和直流电流,采用霍尔电流传感器LA58-P 进行电流/电压转换。交流电流产生的电压信号降压后同样经负电压偏置后接入对应的A /D 转换器采集端口。直流电流对应的电压信号采集经分压电阻降压后进入A /D 采集端子。图3 为交流电压、交流电流的采样偏置电路。其中,Vi 是霍尔传感器产生的电压信号。
除上述介绍的采集信号外,还有电池温度、环境温度、相位检测等与UPS 使用、管理、维护相关的信号参数。根据采集参数的不同,有各自应用的电路。
2 .4 供电模块
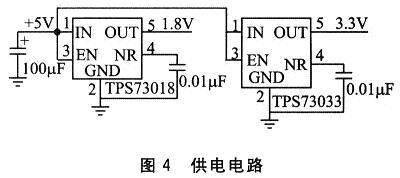
LPC2214 是双电源工作,分为CPU 操作电压(1 .8 V) 和I /O 操作电压(3 .3 V) ,相应地需要两种电压的电源。本设计采用的低压差线性稳压器LDO 为TI 公司的TPS73xx 系列稳压器,将5 V 电压稳压成主控芯片的3 .3 V 和1 .8 V 。TPS73xx 系列芯片是双路输出,输出电流可达250 mA ,内部集成电压监控器监视器,噪声低,负载/线路瞬态响应优良。图4 为双路LDO 电源。5 V 电源来自采用飞兆公司的FSDM0265 设计的反激式开关电源。反激式开关电源设计输入电压为AC 85 ~265 V 。当市电正常供电时,使用市电;当市电电网断电时,由电池的电压向反激式开关电源供电,生成电路中应用的低压直流电源。
2 .5 工作存储模块
工作存储模块采用NAND Flash K9F2G16U0M 。其内部采用非线性宏单元模式,固态大容量存储;容量为256 MB ,采用页写模式;通过并行数据接口连接到数据总线,可以快速地进行存储或读取。
工作信息分为环境信息和系统信息。环境信息有电网电压、环境温度等;系统信息有输入电流、输入电压、输出电压、输出电流、充电电压、电池信息、断电次数、断电时间等。电池信息又分为电池温度、放电程度、放电电流、充电时间、电池电压等。为了数据移动方便,在总线上连接了USB 模块。USB 芯片选用Philips 公司的高性能USB 接口器件PDIUSBD12 。用户可以通过网络监控将存储模块中的数据上传,或者用移动数据存储设备将数据拷贝。如图5 所示,工作时将数据存储到K9F2G16U0M 中。当检测到USB 有外接时,将当前存储的数据打包,通过USB 接口发送数据。

2 .6 网络接口模块
UPS 系统在向网络化、智能化发展,所以在主控模块电路中设计了网络接口,如图6 所示。
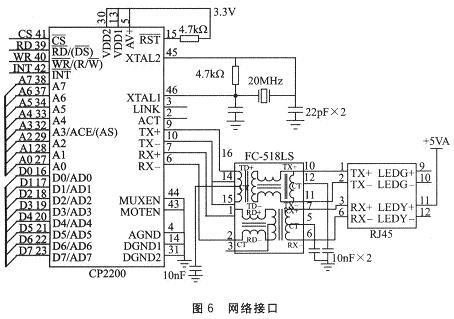
网络接口模块采用CP2200 芯片。CP2200 是Silicon Labs 公司推出的独立以太网控制器。符合。IEEE802 .3 协议,内置10 Mbps 以太物理层器件PHY 及媒介接入控制器MAC ,具有可编程填充和CRC 自动生成功能;具备可编程滤波功能和特殊的过滤器,可自动评价,接收或拒收Magic Packet 、单播、多播等信息包;支持Intel 和Mo-torola 两种总线方式;具有8 KBFlash 存储器,可对其灵活编程。远程接口不仅可以向用户提供远程监控等服务,同时也可以通过网络接口将系统软件升级。图6 中,FC-518LS 隔离器将网络与主控芯片电气隔离,保护系统不受网络中的杂波信号干扰,提高系统的稳定性。
3 结论
基于LPC2214 的数字化UPS ,简化了电路的硬件设计,降低了硬件成本,提高了UPS 的可靠性,扩大了升级空间和产品的多样性。通过搭建实验性电路与程序的结合,验证了设计的正确性,为后续研究提供了一定的实验基础。