1 引言
生产中有许多机械要求既能正转,又能反转,而且常需要快速起动和制动,即需要可逆调速系统。由模拟电路实现的可逆调速系统,线路复杂,调整困难,可靠性低,缺乏灵活的控制。因此,这里给出一种基于单片机的逻辑无环流可逆调速控制系统设计方案。该系统设计采用全数字电路,实现数字脉冲触发、数字转速给定检测和数字PI算法等功能,由软件实现转速、电流调节及逻辑判断和复杂运算,具有不同于一般模拟电路的最优化、自适应、非线性、智能化等控制规律,而且更改灵活方便。
2 系统组成和控制原理
2.1 系统组成
该数字逻辑无环流可逆调速系统是由AT89C51单片机实现双闭环控制、无环流逻辑控制、触发脉冲的形成及相位控制,如图1所示。图1中,ASR为速度环,ACR为电流环,DLC为无环流逻辑控制器,GT为触发脉冲,TA为电压互感器,TG为测速发电机,M为直流电动机。主电路采用正组VF和反组VR两组晶闸管装置反并联。控制电路采用转速ASR和电流 ACR双闭环系统。

2.2 控制原理
数字无环流逻辑控制是根据速度调节器输出值的正负来选择正组或负组晶闸管,根据主电路的电流是否为零进行相应切换.并记忆工作组的工作状态。通过转矩极性检测及零电流检测做出相应逻辑判断,释放一组晶闸管,闭锁另一组晶闸管。为此,在单片机中设置有2个存储单元L1、L2,用于记忆正组晶闸管vF和反组晶闸管VR的工作状态。
3 系统硬件设计
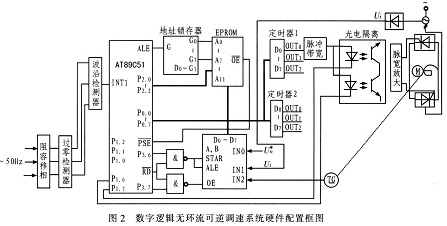
系统硬件设计是以AT89C51单片机为核心,由程序存储器EPROM、地址锁存器、A/D转换器、2个可编程计数器,计时器、脉冲扩宽、光电隔离、脉冲放大、过零检测及波沿检测等电路构成,如图2所示。
3.1 触发器
主变压器和同步变压器均接为D/Y-11,对称的三相交流同步电压经阻容移相后滞后30°。使其交流波形的过零点对准触发延迟角α=0°处,其触发脉冲只能在0°~180°之间产生。阻容移相后的三相交流电压经过零检测器变成互差120°、宽 180°的三相方波,加在单片机的P1.0、P1.1和P1.2引脚,作为检测到的电源状态,并以此状态作为脉冲分配依据,确定VR和VF的触发顺序。方波经波沿检测器输出间隔为60°的负脉冲作为单片机的外部中断请求信号。三相变压器在每个周期产生6个中断信号,在每次中断服务程序中完成脉冲的形成、分配和移项控制。
3.2 PI调节器
PI调节器的控制规律为:

式中,y(t)为PI调节器的输出量;e(t)为PI调节器的输入量;Kp为比例系数;T1为积分时间常数。
对式(1)离散化后,可得第(k-1)和k次采样时刻间的调节器输出增量为△y(k)为:
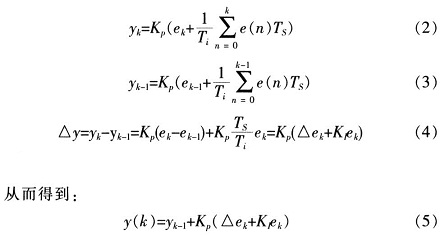
式中,△e=ek-ek-1;yk为PI调节器第k次输出量;yk-1为PI调节器第(k-1)次输出量;ek为第七次采样时,给定量与反馈量之间的偏差;ek-1为第k-1次采样时,给定量与反馈量之间的偏差;KI为积分系数,
由式(5)求得差分方程为:

式中,KI=Kp-K2,K2=TKI;yn为第n次的采样输出;△Un为第n次的采样时输入偏差。为了提高精度,PI运算采用双字节。
3.3 无环流逻辑控制
无环流逻辑控制是根据速度调节器输出值的正负选择VR和VF晶闸管,并由转矩极性检测做出相应逻辑判断,释放一组晶闸管,闭锁另一组晶闸管,并记忆VF和VR晶闸管的工作状态(0或1),存储在单片机存储单元L1、L2。当释放晶闸管时,L1、 L2存储1;而封锁晶闸管时,L1、L2中存储0。将这些状态信号送至单片机的P1.5和P1.6引脚控制触发脉冲的释放与闭锁。
4 系统软件设计
用于控制电流和速度的软件设计决定着调速装置性能的好坏,要求单片机控制的逻辑无环流调速系统在几个毫秒完成两个闭环系统的信号采样、数字滤波、PI运算和实时控制。其主程序流程如图3所示。
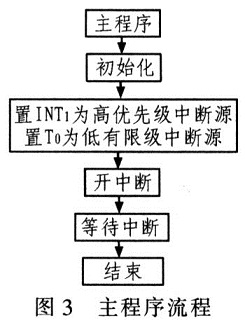
主程序中,等待中断是一条踏步命令,由于电流内环响应速度快于速度外环的响应速度,为此,在定时中断服务程序T0中,嵌套有外部中断1的中断请求。外部中断1的中断服务程序,先进行电流采样,再根据电流的情况进行带限幅的PI运算和数字触发。系统通过定时器T0中断服务程序,实现速度的采样、滤波及无环流逻辑切换。
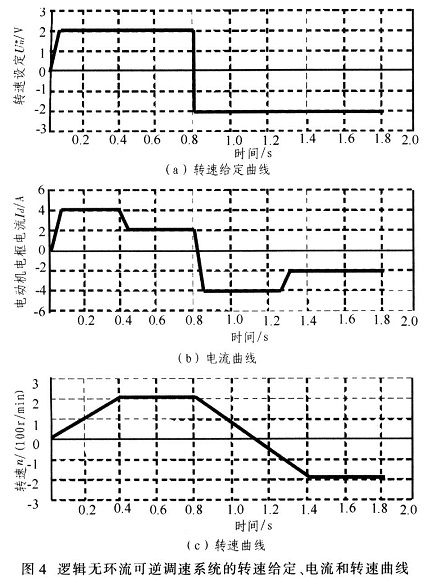
5 结论
逻辑无环流可逆调速控制系统结果如图4所示。由图4可看出电动机电枢电流由所允许的最大值降至稳态值的过程中变化迅速、平稳。电动机从起动至稳态的动态过程中无过冲电流和转速超调,正反向切换过程平稳,动态性能良好。研究表明,采用单片机控制的数字逻辑无环流可逆调速系统稳定性好,可靠性高,提高了调速系统的精度和控制性能,此外,还具有信息存储、数据通信和故障诊断等模拟控制系统无法实现的功能。