1概述
步进电机自动定位系统的主要特点是能实现精确移位、精确定位、无积累误差。它一般应用于难度较大、要求精度高的绘图机或数控机床等系统中。单片机控制步进电机自动定位系统的主要优点是:
⑴用软件代替由硬件电路组成的步进电机控制器,不仅简化了线路,降低了成本,而且提高了系统的可靠性。
⑵为改善步进电机以低于极限启动频率恒速运行时,运行时间过长的缺点,进行加减速控制;步进电机从低速不失步地加速启动,达到高速恒速运行;在将达到目标位置时,步进电机减速运行,最后准确的停在目标位置上,而不会发生过冲现象。这就要求单片机控制的步机电机有加减速控制过程。
⑶微机通过RS232串口实现对单片机的多机通讯,能实时远距离监控由步进电机驱动的工作台,并实时显示工作台当前运行位置和方向。
系统的工作过程是:从键盘和鼠标输入定点坐标(X、Y)后,微机通过串口向各单片机发出指令,各单片机接受到指令后,由单片机软件控制X电机和Y电机的转动方向、转动步数、转动速度,达到自动定位的目的。系统所用电机为75BF001型反应式步进电机(其相数为三相,步距角1.5°/3°,直流电压为24V,相电流为3A)。
2系统硬件设计
硬件线路是由单片机、接口电路、光耦电路、驱动电路、直流电压源电路、步进电机及负载组成,见图1。单片机采用89C51芯片,接口线路中采用74LS377为输出口,1Q-3Q接电机的三相。光电隔离电路的目的是割断驱动电路与单片机之间的联系,避免一旦驱动电路发生故障造成功率放大器中的高电平信号进入单片机而烧毁器件,为此,在驱动器与单片机之间加一级以4N25为主要元件的光电隔离电路,从而提高系统的抗干扰能力。T1采用了高速开关三级管3DK4B,T2选用了TIP41C大功率晶体管。RS、RC、D1构成了泄放回路。尤其需要注意的是:由于该电阻功耗较大,最好选用大瓦数线绕电阻;RC为限流电阻,RC=8Ω;D1为泄放二级,要求能通过大电流,可选用整流二极管IN5402。单片机与电机—相的连接见图2。

图1单片机硬件线路图
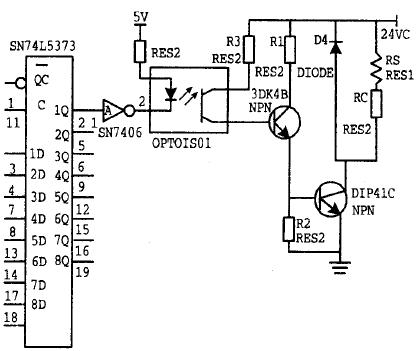
图2单片机与电机一相的连接图
3系统软件设计
系统软件设计的主要任务是判断电机的转动方向、速度和位置,按顺序发出控制脉冲、判断电机是否运行至定位点。由于两个电机的控制完全类似,程序中仅介绍控制一个步进电机的情况。两电机正转的控制脉冲是:A-AB-B-BC-C-CA,反转控制脉冲顺序与之相反。产生时序脉冲的方法是:用单片机的PI口通过MOV@R0,A,写脉冲序列给74LS377;在由74L377控制电机的A、B、C三相绕组。根据三相六拍运行方式,则X电机和Y电机的控制模型为01H、03H、02H、06H、04H、05H。以三相六拍运行方式采用定时器延时的方法来编写升(降)频的控制程序。

图3单片机变频控制程序图
在升频段,设置定时器的初值由小到大,逐次按预定的频阶上升(图4);在降频段,设置定时器的初值由大到小,逐次按预定(图5)的频阶下降,控制按查询表格的方式进行。恒频段步长L由到达指定位置总步数减去升降段总步数确定。定时器T0的各频阶初值依次写在EPROM存储器的同一页中,上半页为升频时T0的初值,下半页为降频时的初值。系统的主程序见图4,单片机串口子程序见图5。
单片机通过串口接收到微机的指令后,执行相应子程序(图5)。微机通过两种方式发送指令:一种是非周期性指令,通常为操作者实时控制指令;另一种是周期性指令,要求单片机实时返回工作台当前位置及运行状态。单片机串口中断子程序接收指令后直接回送给微机,微机可以实时显示工作台当前位置。

图4单片机主程序框图
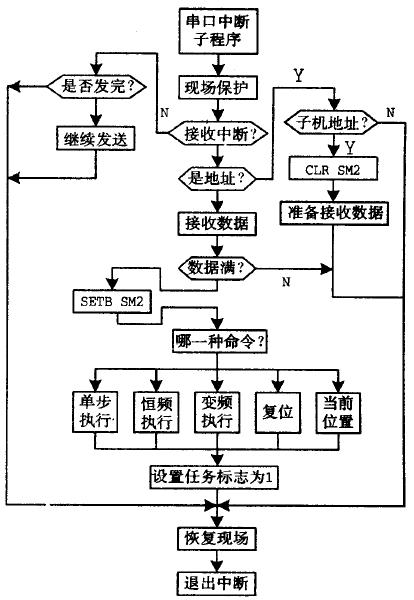
图5单片机串口子程序图
4实验结果及结论
经联机调试,系统运行正常,实现正转、反转、加减速、暂停等自动定位功能,达到设计要求。其特点如下:
⑴用89C51单片机微机系统,以软硬件结合,可降低成本,节约能源。
⑵采用变频控制,提高系统运行速度,可以节约大量时间,并具有良好的经济效益。
⑶采用RS232通讯口,实现了数控系统的通用性设计和远距离监控。
⑷软件采用模块化设计方法,易于维护。