以一个矩形波与该回波后沿收发的时间差测距,就不受宽度和频率影响。设计脉冲宽度随机变化的信号探测,以应对近距离收发常出现的多次反射和非本次的回波干扰。使用矩形波是因为处理便捷,而其频谱复杂,则不采用选频接收;其菱角传输过程被“磨掉”,则采用检测过零点工作形式。回波的升降沿和过零点随发送波形改变,对判别影响不大。
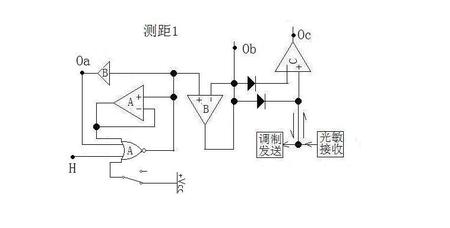
工作不稳定的环形振荡电路参数随运放块A的压摆率与非或门A的传输延时改变,产生宽度随机改变的脉冲序列,由延时较大的B门控制,间歇产生帧脉冲,通过跟随器B,分别经两个二极管加到运放块C的+-端,而+端脉冲调制激光之类器件
将信号发送。用光敏器件接收回波,也加到运放块C的+端(回波信号强度达毫伏级,就不必放大)。发送的信号在运放块C的+-端的电平相等,输出为零;回波信号仅加在+端,被开环放大在Oc端输出,后沿不与发送信号重叠,好辨认。这样,两个后沿 在Oc端高电平宽度就是信号往返标的的时间,一半时间与光速的乘积等于标的距离, 计数电路很快就可以算出。
开关断开,振荡电路才开始工作。以下用模拟电路识别距离。

1),设定探测扇形区:每一个发送脉冲加在JK触发器的复位端清零,Q端低电平;门电路C从后沿起算延时dt时间的高电平加在J端,回波信号后沿落在J端处于高电平的dt时间内,才能触发Q端翻转在Oq端输出高电平,使指示灯亮和/或报警器
响,表示在dt对应距离范围内探测到标的。如果做成电子看门狗,假如dt=4纳秒,对应距离范围0.6米,如果有标的进入该距离范围就发声。或者汽车之类交通工具,设定dt=120纳秒,对应距离18米,在此距离范围有标的,就会报警提醒司机,甚至可以通过自动控制电路调节车速。
2),探测某一距离的弧线:每一个发送脉冲和门电路D从后沿起算的延时dto的高电平加在JK触发器的复位端清零;又在dto之后由门电路C产生短暂延时Δt加在J端,回波信号的后沿落在限定的极短时间Δt内,才能触发Q端翻转输出高电平在Oq端输出,表示在指定距离的弧线上探测到标的,误差由Δt决定。加大Δt时间,探测范围是dto和dto+Δt两条对应距离弧线之间的带状区域。
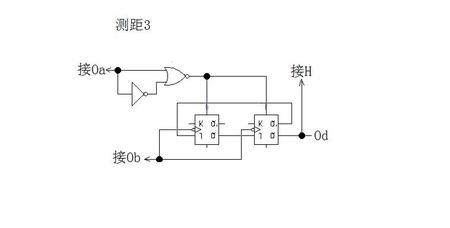
3),用多次确认电路减少误判:判别信号在JK触发器的Oq端输出,根据需要选择N (一般2~3) 位数移位寄存器,帧信号在Oa端输出,非门和非或门微分出窄脉冲对移位寄存器复位清零,一帧内接收到N个相同的信号,末位才在Od端输出高电平确认。同时控制振荡电路H端,不再产生本帧信号。
------ 转载自:CAPTZS的博客