4.电机启动及过零点相移误差分析
前面分析了电机换相点获取的原理,很显然,电机反电势信号的幅值与转子转速成正比,在启动阶段,电机转速很慢,反电势幅值非常小,过零点鉴别困难,难以决定电机换相时刻,为电机启动带来困难.为解决无位置传感器无刷直流电机启动问题,科技工作者提出了多种启动方式,主要有特定位置开环启动法,任意位置开环启动法等.
“三段式”启动法结合了预定位方式和斜坡升速驱动方式,将电机启动过程分为转子预定位,外同步,自同步三个阶段.启动过程平稳可靠.
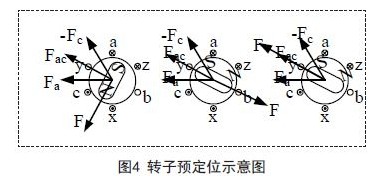
在转子预定位阶段,先导通电机任意一相定子绕组,这分两种情况,一种是定子合成磁势与转子磁势F成非180°角度,一种是定子合成磁势与转子磁势F成180°角度.第一种情况下,转子必然转到其磁势与定子合成磁势重合的位置,如图4中的第三幅.第二种情况下,电子转子处在非稳态平衡点,任何扰动都会破坏掉这种平衡,使电机转子转到稳定平衡点.
两种情况和最终稳定情况如图4所示(假定预定位导通的是A.C两相).
当转子预定位成功后,三段式进入外同步阶段.此阶段转子位置难以精确辨明,电机处在开环加速状态,此时应结合电机调节特性曲线和分析计算的结果,对换相时间合理安排,逐步加速.具体计算方法在资料中有详细介绍,此处不赘述.
一般情况下当转子转速达到额定转速的10%-15%左右时,反电势就会达到比较理想的地步,此时电机进入闭环状态,转子位置由反电势测得,即进入自同步阶段,电机启动完成.值得注意的是,切换点要选择在外同步信号与反电势信号相位基本同步的时刻,以减小电机切换震荡,如图5所示.

在第三节中,分析了相移误差的来源,假设低通滤波电路如图6所示.

则应该补偿的相位误差为:

相延补偿时,若φ≤30°,将换相点选择在过零点之后30°-φ时刻,若φ>30°,将换相点选择在90°-φ时刻.
5.方案MATLAB仿真及实验结果
通过以上的分析和对比,本文中转子位置判定方法采用反电势低通滤波器模拟中性点法,启动方法采用三段式启动法,并对低通滤波器相移误差进行补偿.
MATLAB/SIMULINK仿真模型如图7,电机参数为额定功率为200W.额定转速为3000r/min.5对极.定子电阻Rs为1.5Ω.定子电感Ls为8.5e-3H.

电机仿真转速曲线和反电势波形如图8所示.从图中可看出速度响应曲线良好.启动阶段反电势幅值较小,但电机三段式启动平稳可靠,只有切换点出现了轻微震荡.电机试验系统采用T M S 3 2 0 F 2 8 1 2作为核心控制芯片, 控制电机为东洋公司9 2 B L -4 0 1 5 H 1 - L K B , 额定功率4 0 0 W , 额定电压220VAC,额定转速1500rpm,额定转矩2.5牛米,额定电流2A.

电机端电压波形如图9,模拟中性点和滤波后的反电势波形如图10所示.从图9,10可以看出,一开始反电势完全被端电压所淹没,经低通滤波器后,得到了理想的反电势和模拟中性点波形,经比较器后得出了非常理想的转子位置信号.
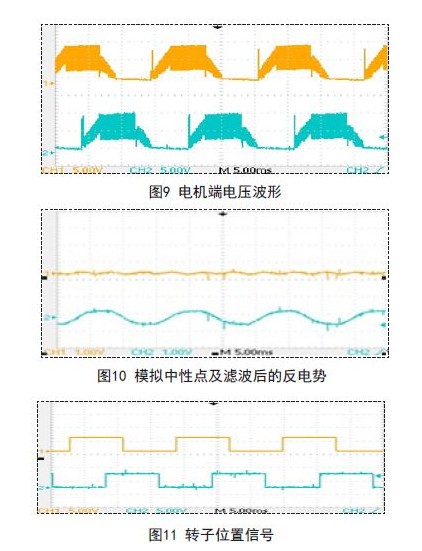
图12为启动阶段电机相电流波形,从图中可以看出,三段式启动方案能很好的完成电机启动,波动较小,启动迅速.

图13为未对滤波器相移补偿和对滤波器相移补偿后的定子电流波形.从图中可以看出,未补偿时,相电流存在明显的尖峰脉冲,转矩脉动必然较大,补偿后,尖峰得到明显抑制,波形显着改善,能有效消除转矩脉动.

综上可以看出,反电势低通滤波法结合相延补偿,能精确的完成无位置传感器无刷直流电机转子位置判定.三段式启动法原理简明,启动迅速,震荡小.这些方法相结合,在无位置传感器无刷直流电机控制中能发挥重要作用,能构成性能优良的无位置传感器无刷直流电机控制系统.