摘要:本文通过对脉宽调制(pulse width modulation,PWM)单相不间断逆变电源(UPS)输出特性的分析。提出了一种基于重复控制和模糊PI控制相结合的UPS逆变器的综合控制策略。模糊PI控制提高UPS逆变器的动态特性,重复控制改善UPS逆变器的稳态精度。实验结果表明,该策略能获得具有良好的动态和稳态特性的波形。
1.引言
UPS通常用在对电源质量要求很高的场合,如金融部门、医疗中心、通信系统、军用设备等。一般要求UPS的输出波形质量好,动态响应快,抗扰能力强。近年来,中外学者发展出了多种逆变电源波形控制技术:PID控制,无差拍控制,滑模变结构控制,重复控制,模糊控制等。各种控制方法均具有各自的特点,表现出优良的特性和不足。本文针对UPS逆变电源波形不能兼顾稳态效果和动态效果的问题,建立了单相逆变器的数学模型,提出了基于重复控制和模糊PI控制相结合的新型控制策略。利用重复控制消除逆变器周期性干扰,提高其稳态精度,利用模糊PI控制改善逆变器对非周期扰动的瞬态响应速度。实验结果表明,基于该控制器控制的UPS输出波形质量好,稳态精度高,动态响应快。
2.单相全桥PWM逆变器的结构
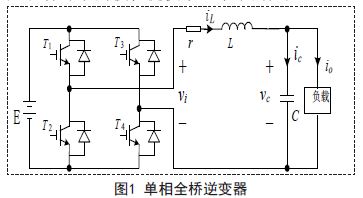
单相全桥逆变器主电路结构如图1所示。
图中,T1~T4为IGBT开关器件,E为直流输入电压,滤波电感L和滤波电容C构成低通滤波器,电阻r与滤波电感L相串联,它为死区效应和各环节的损耗提供了一个小的阻尼。
选取电容C与电感L作为状态变量,根据基尔霍夫电压定理KVL和电流定理KCL,我们可以得到逆变器的数学模型如下:
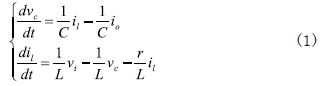
得出单相逆变器的连续时间状态方程:
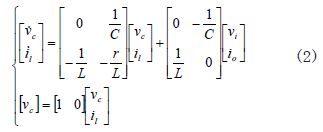
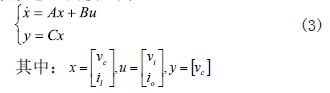
由此状态方程我们可以得到逆变器通用连续状态空间模型为:
3.模糊PI控制器
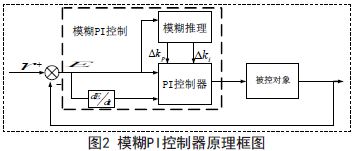
模糊PI控制器主要由参数模糊化、模糊推理、解模糊和PI控制器组成,图2示出其原理框图。本文采用二维结构模糊控制器,以采样信号与参考信号的误差e和误差的变化率ec为输入量,以控制量的变化为输出量,这样的模糊PI控制结构简单,动态控制性能良好。接下来将输入量进行模糊化处理得到误差E和误差的微分量EC,控制器的输出量为p Δk , i Δk .先找出p Δk , i Δk 与E和EC之间的模糊关系,再根据模糊控制规则进行模糊推理,对参数进行在线修正,将算出的参数代入下式计算:

式中0p k , 0i k 为PI参数的初始设定值,由控制系统的特性决定。
建立模糊规则的原则是使系统输出响应的动静态特性达到最佳:当误差大或较大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制变量要以系统的稳定性为主,防止系统超调。因此通过仿真和实验设计可得到针对p Δk , i Δk 的模糊规则表。
4.重复控制器设计
重复控制是基于内模原理的一种控制方法,包括重复信号发生器模块和补偿器模块。
它将重复信号发生器作为周期性扰动信号植入控制系统中,能有效实现系统的无静差跟踪控制。本设计采用改进型重复控制器,即在重复信号发生器内模中附加一滤波器,如图3所示。
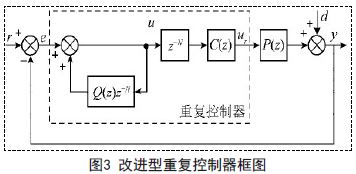
图3中,r为逆变器给定信号,y为逆变器输出电压,e为误差信号,d为死区、负载等其它周期性扰动等效信号,z?N为周期延迟环节,N为一个工频周期的采样次数,Q(z)通过正反馈环节将误差信号进行周期性累加,它可以是一个略小于l的参数或低通滤波器,工程上常取Q(z)=0.9.z?N和Q(z)构成了重复信号发生器。C(z)为重复控制环路补偿器。
补偿器C(z)根据控制对象P(z)的特性设置,在检测到上一周期的误差信息后,补偿器C(z)负责在下一周期给出幅值相位准确的控制量。通常可以采用以下形式实现:

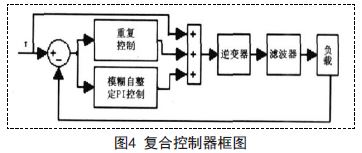
其中: r K 为可调增益。r K 越小,稳定裕度越大;反之, r K 越大,误差收敛速度越快,稳态误差越小,本文r K 取为0.86.zk为超前环节,是补偿器C(z)进行相位补偿所必需的,本文k取6. ( ) 1 C z 常取为一个截止频率与P(z)近似的二阶低通滤波器以实现高频衰减,提高稳定性和抗高频干扰能力。与模糊PI自整定控制构成复合控制器如图4所示。
5.仿真实验分析
本文研究一个11KV的UPS电源,基本技术参数如下:直流母线电压E=380V;额定输出电压UO=220V;额定输出电压频率:f=50Hz;额定输出功率:P=11KVA;输出滤波电感:
L=0.43mH;输出滤波电容:C=140uF;等效阻尼电阻:r=0.1Ω,PWM开关频率fSW=10KHz.
基于MATALAB仿真软件进行仿真试验。
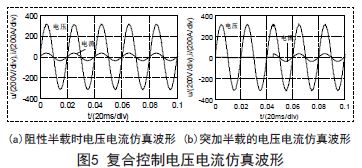
由图5可知,稳态时,稳态精度为0.14%,T H D = 0 . 1 1 %;半载突加满载时电压跌落为19.8V,电压变化率为6.4%.
6.结论
本文针对UPS逆变电源,提出一种将重复控制与模糊PI控制相结合的控制策略,并通过仿真实验验证了该方法的可行性,结果表明所采用的控制方案使UPS的输出电压稳态精度高,稳态误差小,动态响应快。谐波畸变较小,获得了预期效果。(作者:兖文宇,于少娟,赵飞)