引言
本系统选取了32位TMS320F28027作为运动物体的控制中心。TMS320F28027具有丰富的资源,拥有32位架构、高级外设、高度的模拟集成、高达128 KB的快闪存储器,同时还包括功能强大的ADC、高分辨率PWM以及湿著增强的捕获单元等众多特性优异的组件、高精度片上振荡器、模拟比较器、上电复位与掉电保护等在内的各种集成模块。本文以电动车跷跷板的设计为例,介绍了TMS320F28027的PWM电机调速、A/D采样、中断和I/O口等的操作和控制,以及LCD、L298n、红外循迹等外部扩展硬件的连接技巧和方法。
1 小车功能介绍
1.1 按键和显示功能
按键操作:使用3个按键分别进行选择、确认、退出功能操作,在系统上电后,显示界面进入主菜单,通过“选择”按键埘“板上寻平衡”、“上板寻平衡”两个功能进行选择,选定结束按下“确认”键,系统进入对应函数,此时可以按下“退出”键退出对应的功能函数。
显示功能:LCD实时显示小车的倾角和小车正在执行的功能,成功完成一项操作后LCD给出“OK”的指示,同时在每项操作进行时显示其操作所用时间,完成所有任务后显示出每项操作所耗时间。
1.2 “板上寻平衡”功能
在不加配重的情况下,电动车完成以下运动:
①电动车从起始端点A出发,快速行驶到中心点C附近;
②电动车在中心点C附近尽快使跷跷板处于平衡状态,保持平衡5 s,并给出明显的平衡指示;
③电动车从步骤②中的平衡点出发,快速行驶到跷跷板末端B处(车头距跷跷板末端B不大于50 mm);
④电动车在B点停止5 s后,快速倒退回起始端A,完成整个行程;
⑤在整个行驶过程中,电动车始终在跷跷板上,并分阶段实时显示电动车行驶所用的时间。
其中,到达C点附近和倒退回A点有红外循迹装置配合循迹标志完成,寻找平衡主要由倾角传感器检测小车状态控制小车前后移动完成。
1.3 “上板寻平衡”功能
将配重固定在可调整范围内任一指定位置,电动车完成以下运动:
①将电动车放置在地面距离跷跷板起始端A点300 mm以外、90°扇形区域内某一指定位置(车头朝向跷跷板),电动车能够自动驶上跷跷板,如图1所示。
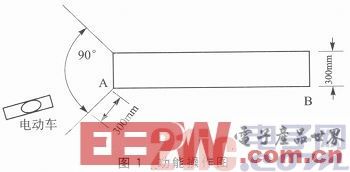
②电动车在跷跷板上取得平衡,给出明显的平衡指示,保持平衡5 s以上。
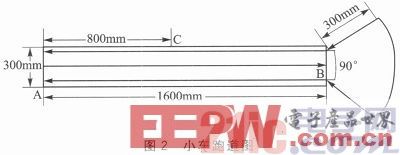
③将另一块质量为电动车质量10%~20%的块状配重放置在如图2所示中A至C间指定的位置,电动车能够重新取得平衡,给出明显的平衡指示,保持平衡5 s以上。
1.4 跑道和小车介绍
(1)小车跑道
跑道分为两个部分:矩形部分的跷跷板和扇形部分的地面区域。图2中两侧箭头代表循迹标识,跷跷板中间箭头为后退的循迹标识。在跷跷板中部C点放置跷跷板支架,保证跷跷板可自由摆动。
(2)小车循迹模块安装位置
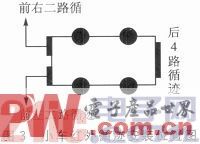
主要介绍小车循迹模块的安装位置,以保让小车能够正确循迹。前进循迹由小车前部左右各两路的红外循迹装置完成,位置配合跷跷板上前进循迹线安装。后退循迹由小车后部的4路红外循迹装置完成,位置配合跷跷板上后退循迹线安装。安装位置如图3所示。
2 功能模块电路连接
2.1 系统总体模型
TI公司32位DSPTMS320F28027为系统的控制芯片,系统通过7 V稳压直流电源给电机供电,同时7 V稳压电源经LM8965稳压模块输出5V电压后给其他模块供电。在上电过后使用独立按键配合LCD12864实现功能选择,选择功能结束,小车在红外循迹模块的引导下到达指定地点开始寻找平衡,此时系统对倾角传感器输出电压进行A/D采样并将数据传输给芯片处理,然后芯片输出信号对L298N驱动的直流电机进行调节,配合光电码盘控制小车在跷跷板上移动以实现平衡点寻找。系统框图如图4所示。

2.2 L298N驱动连接电路
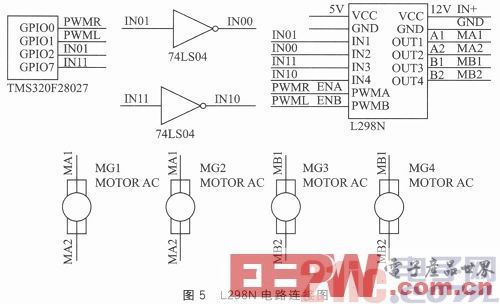
L298N是一块双H桥直流电机驱动芯片,主要是对直流电机进行PWM转速调节,对步进电机进行PWM细分操作。驱动部分的端子电压Vs在+5~+35 V,承载最大电流为2 A;逻辑部分的工作电压为5~7 V,电流为0~36 mA,低电平有效值为-0.3~1.5 V,高电平有效值为2.3 V~Vss。该驱动板可驱动2路直流电机,使能端ENA、ENB为高电平时有效,设置IN1和IN2的输入电平确定电机的转动方向,改变输入使能端PWM脉冲的占空比实现调速。(注意:当使能信号为0时,电机处于自由停止状态;当使能信号为1,且IN1和IN2为00或11时,电机处于制动状态,阻止电机转动。)
由于小车采用的是左右两侧速度差转向,所以为了节省I/O口,电机连接时使用一个I/O配合使能端控制一侧的两个电机的转向和转速使能端控制转速,I/O口控制转向。具体操作:同侧的两个电机并联,电机一端通过I/O口经L298N控制,另一端从同一I/O口引出一根信号线经一非门后由L298N控制。具体电路连接如图5所示(其中MG1~MG4为4个直流电机)。

方向设定主要函数如下:

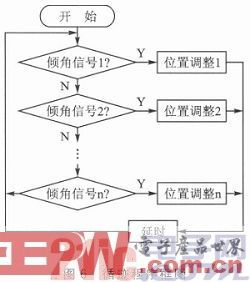
配合循迹模块即可实现小车循迹功能。循迹模块分为前后4路,前4路的4个信号端口与后4路并联,前4路的4个红外循迹模块由一个I/O口供电,后4路供电由此I/O口经一非门供给。只需改变此I/O的高低电平即可完成前后循迹模块的切换。循迹程序框图如图6所示。
循迹主要程序如下:


2.3 LCD12864电路连接
为了节省I/O口,显示选用的LCD为SPI传输型,主要用于必要数据显示以及菜单和系统状态显示。该模块一共有10个引脚,其中除去电源引脚和空引脚还有RET引脚用于上电复位,CS引脚传输主从状态选择,SCK引脚时钟信号输入,SDA引脚数据输入,BUSY引脚判忙接口。由于I/O口的限制,我们采用的并非SPI数据传输模式,而是选用的模拟SPI数据传输。模拟SPI主要是对数据传输时序进行模拟。
模拟SPI数据传输,只能对数据进行一位一位的传输。因为此时序为上升沿触发,所以在传输之前时钟信号置低,传输结束后置高。但是程序的编写比较麻烦,因为此LCD的命令和数据都是8位数据。所以选择按位与加移位实现输入8位数据,具体程序如下:

在实际操作中,每次上电需要对LCD进行复位设置(RST先置低10 ms左右,然后置高20 ms左右)这样才能保证LCD正常显示,同时在命令和数据传输之前需要对LCD进行初始化操作,即对LCD进行清屏操作(清除上电一瞬间的乱码显示),然后根据需求进行亮度设置。由于此设计中LCD只需进行数据的接收,所以CS片选端直接接地,设置LCD为从输入设备即可。具体电路连接如图7所示。

2.4 倾角传感器电路连接
倾角传感器选用的是数字信号传输的MMA7361,此模块能够检测器件的X/Y/Z三轴的倾斜角度,以及期间的加速度。小车在跷跷板上寻找平衡只需一个轴检测倾角即可,所以任选一轴与小车车面平行,竖直指向车头即可。
当小车发生前后倾斜时,输出电压改变,通过输出电压的线性变化反映小车的倾角、运动加速度,以及运动的方向。通过A/D采样进行相应的电压/角度、电压/加速度转换,这样便可以时刻调节小车姿态。
倾角传感器A/D采样程序设定如下:
结语
本文只用了TMS320F28027的部分功能,算法也比较简单,只是为大家的学习交流抛砖引玉而已。TMS320F28027还有很多强大的功能,有待以后大家的学习和使用。
个人的使用经验表明TMS320F28027运算速度快,而且操作简单易学,不仅适合完成各种业余的电子设计制作,而且也能满足专业人士的大部分需求,是性价比较高的芯片。在配合外部扩展硬件的使用过程中,需仔细阅读TMS320F28027和硬件模块的电气参数,以防止元器件的损毁。