摘要:在ATM机和纸币清分机中,钞票的厚度检测是必须的功能,通过钞票的厚度特征可以识别钞票上粘贴的胶带和折角等,从而剔除不合格钞票。本文论述了一种电涡流式钞票厚度检测传感器,采用并列的结构相同的多路厚度传感器,通过每路独立的厚度传感器检测出来的信号,拼接成整张钞票的厚度特征,从而识别钞票是否有异常。本传感器具有电路简单、成本低、检测范围大等优点。
0 前言
电涡流厚度检测具有成本低、线性范围大等优点。通过选择合适的频率点和被测金属材料,可用于检测金属材料的位移。通过机械结构把钞票厚度转换成金属材料位移的变化,可以用于测量钞票厚度。
在ATM机和纸币清分机中,钞票的厚度检测是必需的功能,通过钞票的厚度特征可以识别钞票上粘贴的胶带和折角等,从而剔除不合格钞票。由于胶带可能粘贴在钞票上的任何位置,所以厚度检测必须能够覆盖整张钞票的范围,需要设置紧密排列的多路厚度传感器,每路厚度传感器的结构相同,检测原理也相同。通过多路独立的厚度传感器检测出来的信号,拼接成整张钞票的厚度特征,从而识别钞票厚度是否有异常。
1 电路原理
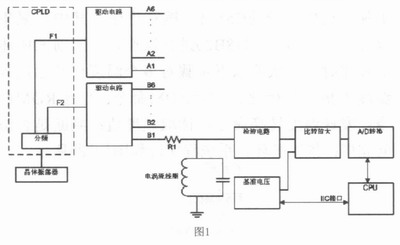
原理框图如图1所示,由晶体振荡器、CPLD、驱动电路、电涡流谐振电路、检波电路、比较放大、基准电压产生、A/D转换器、CPU等部分组成。
1.1 晶体振荡器
采用有源晶振,提供稳定的频率给电涡流线圈作为激励源,系统的频率稳定性取决于此晶振。
1.2 CPLD
晶体振荡器产生的振荡信号输入CPLD,经过CPLD分频后,输出2个不同频率的信号到驱动电路,再输出到电涡流线圈。共有12路电涡流线圈,分别是A1~A6、B1~B6,A和B的工作频率不同,A和B在PCB板上交替排列,防止互相干扰,如图2所示。

1.3 输出驱动电路
用于提高CPLD输出信号的驱动能力,驱动电涡流线圈工作。
1.4 电涡流谐振电路
由电涡流线圈和谐振电容组成。应该谐振在工作频率的附近。
1.5 检波电路
负责检出经过谐振电路分压后的高频信号包络。
1.6 比较放大
把检波输出电压和基准电压相减后放大输出,以得到较高的分辨力,输出到A/D。
1.7 基准电压产生
每路传感器的基准电压可通过IIC接口调节,用于和检波输出电压相减,以补偿结构或电路的差异造成检波输出电压的不一致。
1.8 A/D转换器
用于把放大输出的传感器模拟信号转换为数字信号,采样速率和采样时间受CPU控制。
1.9 CPU
控制A/D转换器进行传感器信号采集、非线性修正等。
2 厚度传感器结构原理
厚度传感器的机械结构原理如图3所示,由1条基准轴和12个浮动轮构成。基准轴固定在两侧框架上,要求旋转起来圆周的跳动尽可能小。浮动轮围绕着转轴上下运动,被测金属片固定在浮动轮上,随浮动轮一起上下运动。电涡流线圈固定在电路板上,位置固定不变。弹簧负责给浮动轮施加压力,使浮动轮紧贴基准轴。限位片用于防止浮动轮横向移动。基准轴和浮动轮紧贴在一起旋转,钞票经过两个轮子之间时,浮动轮会被顶起,造成被测金属片和电涡流线圈距离发生变化,通过检测顶起的高度,可以得知钞票的厚度情况。

3 厚度测量方法
首先需要厚度自校准,相当于自学习的过程。先让厚度组件空转,测得传感器输出电压,称为零值电压,然后使用1张标准厚度的测试钞票,称为校准钞,以正常速度通过厚度组件,测得传感器输出电压,此电压减去零值电压,得到电压变化量,然后转换成100 μm厚度对应的传感器输出电压变化量,即为K值。比如校准钞的厚度为110 μm,对应的电压变化量为550mV,则100 μm的电压变化量为100/110×550= 500mV,即K值为500mV。假设厚度组件是稳定的,那么其K值应该恒定不变,后续的测量可以此为基准。
正常点钞时厚度检测,每次点钞前都会让厚度组件空转,先测得零值电压,然后开始点钞,用测得的钞票厚度电压减去零值电压,得到的电压变化量通过K值换算成实际的钞票厚度。即如果测得的厚度电压变化量为600mV,那么厚度为600/500×100=120 μm。
实际使用时由于振动、机械磨损的影响,使金属片和传感器的距离发生变化,由于距离和传感器输出的关系不是线性的,所以相当于厚度K值发生了变化,为了补偿K值的变化,需要在使用前先进行非线性修正。
4 非线性修正方法
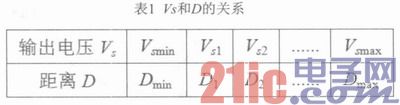
首先,通过人工测量的方法得到传感器输出电压VS和检测距离(金属片到传感器的距离)的关系曲线。设基准电压的调节范围为Vbmin~Vbmax,Vo的变化范围为Vomin~Vomax,且Vo=(Vs-Vb×G,G为放大倍数。实际使用时,要给Vo预留上下变化的范围,要求没有钞票时Vo= Vomax/2。调节金属片到传感器的距离D,使Vs在Vbmin+Vomax/2/G到Vbmin+Vomax/2/G之间变化,得到传感器输出电压Vs和检测距离的关系曲线,如图4所示。该关系曲线存储在CPU的非易失存储器中。该关系如表1所示。
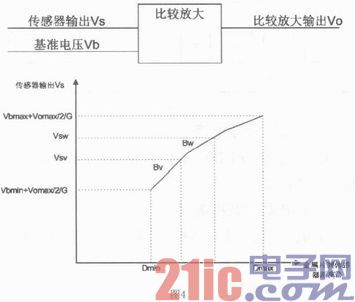
实际测量前,先对厚度组件进行校准,得到当前工作点的K值Kw。然后CPU根据当前基准电压Vb和比较放大输出Vo的值,可以计算出当前Vs值Vsw=Vo/G+Vb,CPU通过查找内部存储的关系曲线,计算出Vsw点的斜率Bw。假设Vsw处于Vs1和Vs2之间,那么Bw=(Vs2-Vs1)/(D2-D1)。
实际测量时,同样根据基准电压Vb和比较放大输出Vo的值,可以得出当前的Vs值Vsv。查表计算出Vsv点的斜率Bv,那么当前的K值Kv=Bv ×Kw/Bw。即实现对K值的非线性修正。
5 结束语
该传感器通过引入CPLD分频,采用门电路驱动等方法,抛弃了复杂的高频振荡电路和功率放大电路,具有稳定性好、电路简单、成本低等优点。采用特别的非线性修正方法和校准方法,具有机械误差容忍度好、检测范围大等优点,可以适用于ATM机和纸币清分机等要求小体积、低成本的场合。