一、项目概述
1.1 项目摘要
遥控玩具是广受欢迎的一种玩具,但是对于刚刚学会走路的小孩子来说操作复杂的遥控器显然不太现实,因此提出设计一种能自动跟随小孩的运动状态的玩具飞机。该玩具采用微惯性加速度计和陀螺仪作为小孩动作信息采集传感器,测量小孩的运动状态,通过无线发射将该信息发送给遥控飞机的无线接收模块,由飞机的中央处理单元判断出小孩儿的运动状态,控制飞机跟随小孩运动。这样实现了飞机对小孩的跟随,并且有信号传输给父母,让父母能够知道孩子所处的地理位置,以及所处温度,是父母看护孩子,与孩子交流的新方式,真正的起到了守护者的角色。另外,还有娱乐功能,遥控飞机在跟随过程中还可以发出各种可爱的声音逗小孩开心。此外,玩具还可以工作在遥控模式,由年龄稍大的孩子遥控玩具,增加玩具的趣味性和安全性。
1.2 项目背景
(1)市场规模
随着中国经济的发展,中国城乡居民的消费支出中,玩具类支出将越来越大。中国16岁以下儿童有3.6亿左右,占人口的比重约20%。目前中国儿童消费已占到家庭总支出的30%左右,全国0-12岁的孩子每月消费总额超过35亿元。但中国14岁以下的儿童和青少年的人均年玩具消费仅20-30元人民币(2.4-3.6美元),远低于亚洲儿童人均年玩具消费13美元和全世界儿童人均年玩具消费34美元的水平。如果中国玩具消费达到亚洲平均水平,市场规模预计将突破300亿元人民币。内地玩具市场未来将以每年40%的速度增长,到2010年销售额将超过1000亿元人民币。
(2)发展趋势
进入21世纪,各种整合了声、光、电功能的高科技玩具开始抢占传统玩具的地位,世界第一玩具消费国——美国在这方面表现得特别典型。近几年来,中国市场也逐渐出现越来越多的智能玩具,如智多熊,它成功地将多种产品整合在一起,通过人工智能技术,让孩子在与智多熊的交流互动中获得快乐、提高智商。
(3)社会条件
由于计划生育政策的贯彻落实和日益增长的生活压力,更多的家庭选择只要一个孩子,同时父母陪伴孩子的时间也越来越少,但是父母对于孩子的关爱并没有减少。越来越多的家长愿意购买玩具来缓解孩子的孤独感,同时玩具本身具有的调节人体智力、体能和情绪的综合能力,也有益于孩子的身心健康。
我们的目的是设计出一种兼具娱乐和监控功能的玩具。既能减少孩子的孤独感,又能让父母了解孩子的所处环境,预防未知事故的发生。
二、需求分析
2.1 功能要求
1. 该玩具飞机能够获取小孩的行走或运动路径,从而在一定距离内实现实时追随,给小孩带来玩耍的乐趣;
2. 感知小孩所处环境(如气温、气压),并将信息及时传递给家长;
3. 两种模式:具有“跟随”模式和“手动”模式的切换功能,“跟随”模式下,玩具飞机追随小孩的运动,在“手动”模式下,通过遥控器控制玩具飞机的运动;
4. 电量检测与自我保护:当电量不足时,玩具飞机则自动安全降落至底面。
5. 将小孩的地理位置、所处环境、温度压强传输给父母:家长可以通过遥控器设定好小孩玩耍的范围,在“跟随”模式下,当玩具飞机距遥控器超出设定的阈值时会以提示家长:小孩离自己过远了,如图1所示。

图1家长监控原理图
6. 在玩具飞机飞行的过程中,可随机地播放儿歌等音乐;

图2 守护天使成品设计图
2.2 性能标准
1. 玩具飞机与小孩在20~30米范围内能实现稳定可靠的无线通讯;
2. “追随”响应的延迟时间控制在5秒之内;
3. 玩具飞机在“追随”模式下的飞行高度为1.5~2米;
4. 系统在环境温度为-20℃~40℃下能稳定工作;
5. 续航能力在1小时以上。
三、方案设计
3.1 系统功能实现原理
系统主要包括运动状态采集模块,无线通信模块,飞机硬件模块。
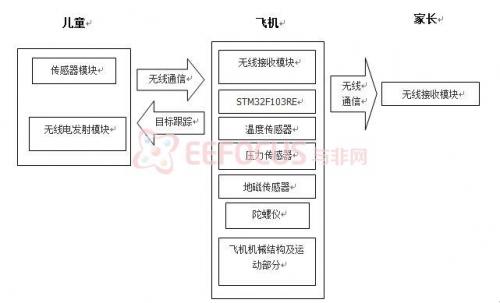
图3 守护天使系统硬件架构图
3.1.1运动状态采集模块
守护天使系统的运动采集模块包括的传感器是陀螺仪以及加速度及,其中通过陀螺测定转动速度并以微加速度计测定运动状态。跟踪目标(儿童)的运动状态信息(加速度,转角)传给无线通信子系统的发射模块。
目标状态测定的准确性直接关系到整个系统的工作性能。
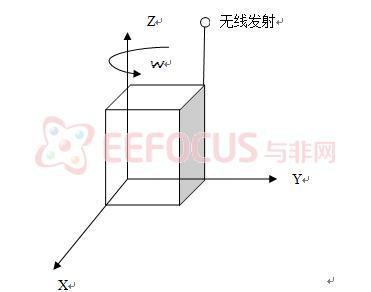
图4 信息采集系统
3.1.2无线通信子系统
该系统包括两组无线发射模块和无线接收模块。
第一组无线发射模块(置于儿童身上)把陀螺仪及加速度计的采集的目标信号发射给飞机上的接收装置,接收装置直接将信号传给存储器。飞机通过无线接收模块接收传感器的信号,并通过MCU发出的命令进行运动,通信的高速性、稳定性和准确性至关重要,它直接影响了整个系统的采样周期。
第二组无线发射模块置于飞机上,将从儿童身上采集的目标信号及自身传感器采集到的信号发射给接收装置,接受装置将信号显示在遥控器的LED上。
本系统选用iNEMO系列模块配备的ZigBee通信协议来实现这部分功能。
3.1.3飞机硬件模块
守护者飞机作为系统的执行机构,不仅要求具有较好的机械性能,小尺寸、轻重量等要求;在运动性能的控制上,也具有较高的精度和实时性。
飞机设计有四个模块:信号接收模块、存储器与中央处理控制模块、飞机执行模块、信息探测模块。
(1)信号接收模块:
接收装置依据ZigBee通信协议将接收儿童身上的运动信息即传感器信号传给存储器。
(2)传感器信号处理:
中央处理器从存储器中读取数据,通过算法分析计算初始儿童 X、Y 轴的加速度和转角,并算出飞机需要的转速,输出对应脉宽的脉冲控制飞机飞行,随时接收飞机的反馈信号做出相应的处理。选用基于ARM的低功耗高性能32位微控制器STM32F103RE来实现。
(3)信息探测模块:
地磁传感器检测儿童活动范围是否超出设定阈值
执行过程大体可以分为预测、观测和更新三个阶段。首先将儿童的位置存储在一个独立的状态向量中, 然后通过先预测再观测的迭代递推过程来估计系统状态,实现对儿童的定位和距离被观测点的位置的计算。 执行过程的各阶段可以描述为:
(a) 预测阶段,初始化得到飞机位置和遥控器的相对初始位移;
(b) 观测阶段,当飞机运动时,利用飞机自身携带的传感器识别当前位置的特征,即偏离特
征,获得遥控器与飞机之间的相对位置,建立量测方程,根据载体预测位置和特征点位置计
算两者的相对位置关系;
(c) 更新阶段,利用观测信息进行滤波更新,同步更飞机位置和遥控器的位置。
故选用LSM303DLH数字罗盘可以方便快捷的实现所需功能。
温度和压强测量儿童所在的环境信息
选用LPS001DL压力传感器测量环境压强、选用STLM75温度传感器,测量环境温度
(4)飞机执行模块:
跟踪飞机为一个直升飞机,飞机的飞行姿态是通过由中央处理器输出的脉冲宽度来控制调节发动机和各个控制舵面来实现的。飞机上有以下几个地方需要控制:
1) 发动机进气量,来控制发动机的拉力(或推力);
2) 副翼舵面(安装在飞机机翼后缘),用来控制飞机的横滚运动;
3) 水平尾舵面,用来控制飞机的俯仰角;
4) 垂直尾舵面,用来控制飞机的偏航角;
3.2 硬件资源配置
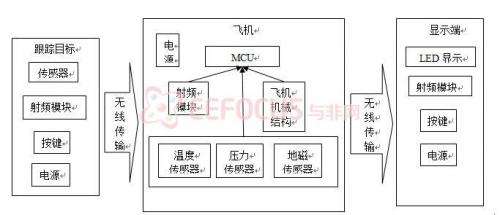
图5 硬件资源配置图
主要由三个部分的硬件电路,
(1)跟踪目标(儿童)的硬件配置,主要的硬件包括位于儿童腰部的运动状态采集传感器(加速度计和陀螺仪),用于传输数据的射频模块,以及基本的电源和开关电路。
(2)飞机的硬件配置,包括STM32F103RE微控制器,LPR430AL陀螺仪,LY330ALH陀螺仪,LSM303DLH:地磁电子罗盘,LPS001DL压力传感器,STLM75温度传感器,音乐播放模块以及基本的电源和开关电路。
(3)显示端的硬件配置包括LED显示电路、信号接收的射频模块以及基本的电源和开关电路。
3.3系统软件架构
软件系统分为四个模块:
(1)通讯模块实现对无线通讯模块的传感信号的收发;
(2)运动模块实现对电机、电调的驱动,使电机按照指定的方向和速率转动,实现对飞机的控制;
(3)运动控制模块,通过参考当前的运动状态,通过选择合适的运动控制算法,控制电机的运动状态进而控制飞机的运动状态;
(4)主模块,通过合理的算法和调用,实现各个子模块之间的配合,完成系统的功能,满足系统的要求。
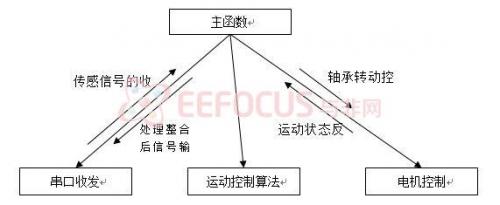
图6 软件系统各子模块
3.4 系统软件流程
3.4.1通讯系统软件系统框架设计
根据STM32F103RE处理器特点,本系统采用ZigBee模块作为无线接收器,串口对无线收发模块收一发状态转换的控制。处理器控制信号流程图如图 7所示。

图7 处理器控制信号流程图
3.4.2 轨迹计算流程图
轨迹计算总流程如图8所示,首先由MCU调用轨迹计算子程序,在子程序中判断该时刻是否为初始时刻,若该时刻为初始时刻则将速度和位移初始化;若该时刻为非零T时刻,则通过一定的数据处理算法以及T-1时刻的速度和位移数据来获得T时刻的速度和位移。

图8 轨迹计算流程图
3.4.3 飞机的控制算法
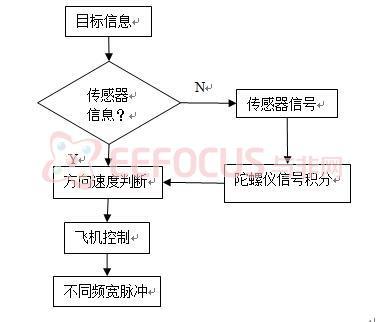
图9 系统控制算法结构框图
假设儿童是一个有一定大小的点,即可以在三维空间内自由运动。根据测得的加速度可以得到儿童的速度和位移。考虑到测量过程中重力加速度的影响,通过加速度计算得到速度和位移的最基本方程为:

其中*代表绝对坐标系 X,Y,Z 轴向中的任意一个,v0,s0分别是初始速度和位移,t0是测量开始时间,te是测量终止的时间。在测量中只需要测量 X,Y,Z三个轴向上的加速度以及运动的起始和终止时间t0,te就可以得到三个轴向上的速度和位移特征。
如果数据采集周期 T 很小,则在 ∆ t 时间内可以认为其运动状态为匀速运动,通过 X、Y 方向的位移计算可以求ψ、θ 角,从而可以控制飞机的转弯飞行等。
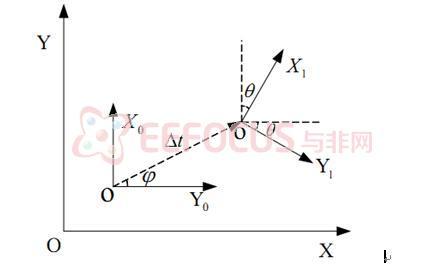
图10 系统数据采集模块运动示意图