随着电力电子技术的飞速发展和各行业对用电没备控制要求的提高,人们对供电的电源要求也越来越高。电源的性能直接影响着整个电路系统的性能、寿命。以往所采用的电源大多数是旋钮式电位器进行调节,输出电压无法实现精确的步进。数控电源是从上世纪80年代发展起来的,到现在大多产品的电源仍存在误差较大、分辨率不高、功率较低、效率低、可靠性较差等缺点。因此,设计一款高效率、高性能、精度的数控电源是非常有必要的。
根据实际需要,本设计以输出电压可在0~24.0V范围内任意设定,精度±0.1 V,最大电流为5 A,纹波优于1%,效率达70%以上为目标。数控电源以STC12C5A60S2单片机做为CPU,通过按键设定输出电压,单片机给出一定占字比的PWM信号对BUCK电路中的开关管进行控制,经电感、电容滤波后输出一电压。输出端先采用电阻进行分压,然后经反馈电路,最后送入单片机ADC口进行采样。基于PID算法的原理,单片机将输出值与设定值进行比较,得到偏差,然后利用偏差对PWM信号的占空比进行控制,最终系统输出一个稳定的电压值。
1 总体设计
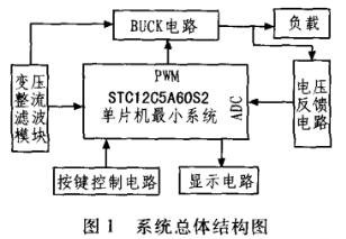
该数控电源系统总体结构如图1所示,主要由STC12C5A60S2单片机最小系统、变压整流滤波模块、BUCK电路、电压反馈电路、显示电路、按键控制电路等组成。单片机最小系统是数控电源的核心组成部分,负责产生BUCK电路所需的PWM信号;同时实吋检测电压反馈电路的电压。变压整流滤波模块一方面提供单片机、电压反馈电路、显示模块等所需的电源;另一方面经过降压式变换电路(BUCK电路)后直接提供给负载。显示电路主要用于显示设置电压和实际输出的电压。系统将反馈电压与按键控制电路设置的电压进行比较,得到PID算法所需的各个变量,进而控制PWM信号的占空比,得到与没定电压误差非常小的电压。
2 系统硬件设计2.1 STC12C5A60S2单片机最小系统
数控开关稳压电源丁作在开关状态,其能量损失只有小部分消耗在开关管的导通压降上,效率高。BUCK电路在开关稳压电源中应用非常广,故本系统选择BUCK电路进行设计。
一方面,BUCK电路工作频率通常为几千赫兹到几兆赫兹,通过定时器来控制普通IO口产生PWM已无法满足;另一方面,为了实时对输出电压进行检测,这时系统必须具备A/D转换功能。采用专门的A/D转换芯片,固然可实现输出电压的检测,但电路变得复杂且成本偏高。经综合考虑,本系统采用STC12C5A60S2单片机作为系统的主控制器。
STC12C5A60S2是一款功能强大,性价比高的单片机。STC12C5A60S2单片机是宏晶科技生产的1个时钟/机械周期(1T)的单片机,工作频率为0~35 MHz,相当于传统8051的0~420 MHz。内部集成MAX810专用复位电路,使系统更加稳定可靠地运行。内部集成了两路可编程计数器阵列(PCA)模块,用于输出PWM信号。常温下,使用内部RC振荡器作为单片机时钟时,可输出14~19 kHz的PWM信号;使用外部32MHz晶振作为时钟时,频率最高可达125 kHz。STC12C5A60S2有8路10位高速ADC,90个时钟周期转换一次,CPU工作频率32 MHz时,ADC转换速率约为356kHz。为了实现数控电源内部高速运算,本系统时钟采用外部32 MHz晶振作为时钟源。
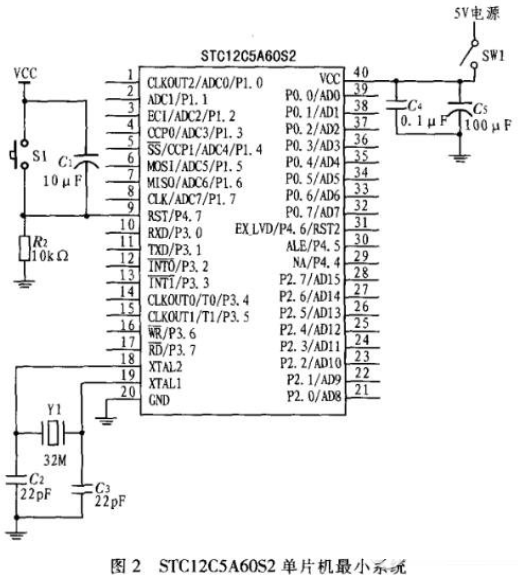
STC12C5A60S2单片机最小系统由时钟电路、复位电路组成,其电路如图2所示。单片机最小系统实现按键输入识别、显示控制、PID算法等。