随着计算机以及各种精密自动化设备、电子设备被广泛应用于通信、工业自动化控制、办公自动化等领域,逆变器作为UPS的重要组成部分,近年来得到了迅速展。对逆变器的控制成为研究重点,即要求其输出波形稳态精度高、总谐波畸变率低和动态响应快。目前,瞬时PID控制、重复控制等技术都在应用中占有重要地位。但这两种技术都有难以克服的缺点,如瞬时PID控制难以实现数字化;重复控制的动态响应慢。美国著名控制理论专家卡尔曼于60年代初提出了数字控制的无差拍控制思想。随着电力电子技术的发展,80年代中期,无差拍控制被应用于逆变器控制,它具有瞬时响应快、精度高、THD小等特点,是一种优秀的控制策略。
1 无差拍控制逆变器的控制原理
无差拍控制是一种通过状态的数字瞬时反馈,利用微处理器的高速数值计算功能实现的全数字化控制方式。图1为逆变器主电路,由逆变桥、LC滤波器和阻性负载组成。LCR可以由状态方程表示:


在逆变器系统中,Uin是逆变桥的输出,是一个中间变量;只有脉宽ΔT才是原始的控制量。并且,逆变器主电路可以认为是一种数模混合电路,因而利用离散变量状态方程可以更方便的分析。对
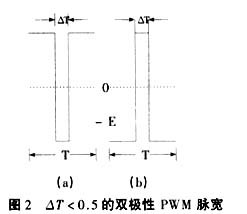
于图1所示电路,Uin可以是单极性,也可以是双极性的 。若Uin为图2所示双极性,则可将式(1)离散化[1][2]:
式(2.a)和(2.b) 分别对应图2的(a)、(b)。分别取矩阵方程(2.a)和(2.b)的第一行,并令,UC(K 1)=U*C(K 1),U*C为参考正弦,则所需脉宽可相应计算 。那么,在每个开关周期的开始,必须先检测UC、IC(母线电压E的变化较小,不必精确按时检测),然后计算ΔT。因此,在实际系统中,通常需要三个传感器和A/D转换器检测直流母线电压、输出电压和滤波电容电流。由于A/D转换和计算都需要一定的时间,因此ΔT的最大值受到限制。从图2可知,若输出为正时,采用图2a,则ΔT≤0.5T。所以,存在足够的(T-ΔT)/2时间用于采样和计算。
普通PWM逆变器在空载和满载时,它的输出相位有较大的差异,这是因为逆变桥的输出相位虽与给定正弦同相,但是LC滤波器的相移与负载有关。无差拍控制逆变器的输出相位基本不变,它通过调节逆变桥的输出相位来弥补LC滤波器的相位延时。
2 无差拍控制逆变器的实现
德州仪器公司(Texas Instrument)开发的第三代数字信号处理器(Digital Signal Processor)TMS320F240系列具有16位高速定点运算功能。这种型号的数字信号处理器芯片具有如下优点:
(1) 很高的处理速度。单指令执行周期为50ns,即每秒可执行两千万条指令。芯片内有专用的16*16硬件乘法器,并设置有8级硬件堆栈和四级流水线处理结构,极大地提高了对数字信号的处理速度。544kB的高速片内双向存取RAM使得片内数据能够实现高速传送;
(2) 特有的并行结构。传统的冯-诺依曼结构中程序代码和数据单元是统一编址的,而F240采用改进的Harvard结构,程序区与数据区存储单元是分开的,取指令和数据存取可同时进行。这样使得处理速度进一步提高;
(3) 丰富的指令集提供了灵活的编程能力。不仅能实现各种算术和逻辑运算功能 ,而且能很方便地完成程序区和数据区之间的信息传递;
(4) 高度集成的内部资源。芯片中嵌入了专用的事件管理器(Event Manager),能很方便地捕获事件中断和输出各种PWM波形。片内还集成了A/D转换器、串行通讯、I/O接口等外围功能,因此十分容易构造控制系统,而且极大地减少了硬件开销。
由于具有上述优点,DSPF240系列尤其适合实现数字化控制所需的实时化、高速处理的要求。其内部资源包括:
(1) 三个独立的16位硬件定时器,具有6种工作模式;输出共有12路PWM脉冲,便于实现单相半桥、全桥和三相全桥(可设置死区,以及实施空间矢量PWM控制)的电力电子变换器控制;
(2) 具有三路外部硬件中断和4个外部事件捕获中断(Capture),系统中有RESET复位中断、掉电中断PDPINT、非屏蔽中断NMI等软件资源,为系统的安全工作提供了保障,同时可以对特殊事件进行及时处理;
(3) 两个独立的10位精度A/D采样转换器,内部带PLL锁相环的时钟单元,看门狗监控单元Watchdog,串行同步口SPI和串行异步口SCI,28个可编程多路复用I/O口等 。
从上述内部资源可见,TMS320F240系列的DSP在控制系统设计时不需要太多的硬件开销,从而也提高了系统的可靠性。


; 

3 仿真与实验结果
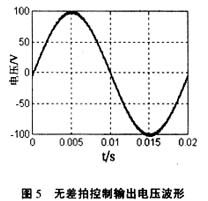
在理想状态下,用MATLAB对无差拍控制半桥逆变器进行仿真。其电路参数为:L=1mH,C=20μF,开关频率为10kHz。直流母线电压E=300V,输出50Hz,100V峰值交流 。其输出波形如图5所示。

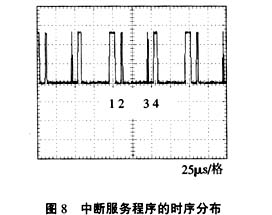
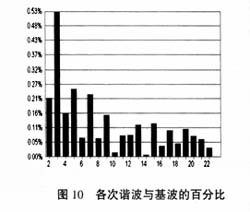
实验充分利用了TMS320F240的事件管理器功能和中断,实现无差拍控制。图3、图7为控制主程序和中断服务子程序的流程图。主程序包括初始化(开放和设置相应中断)、启动检测和软启动;T1周期中断服务程序包括读正弦表、系数计算和启动母线电压的检测,如图4。T2下溢中断服务程序用来启动UC、IC的检测。A/D完毕中断服务则用来处理母线电压检测完毕后的数据存储和UC、IC检测完毕后ΔT的计算,如图6。图8是中断服务程序的时序分布图,1、3分别是T1周期中断服务程序和T2下溢中断服务程序;2、4是A/D完毕中断服务程序的两次响应。其中,1、3相差50μs (0.5T),1、2和3、4相差7μs (A/D转换所需的时间)。图9和图10是逆变器的输出波形及其各次谐波所占的比例。根据图10可计算其谐波畸变率为0.8%。

参考文献
1 Gokhale K P, Atsuo Kawamura,Hoft R G. Deadbeat Microprocessor Control of PWM Inverter for sinusoidal Output Waveform Synthesis.IEEE-PESC'85.28~36
2 Hua Chihchiang.Two-Lever Switching Pattern Deadbeat DSP Controlled PWM Inverter. IEEE Trans. Power Electron.1995,10(3):310~317
3 Yasuhiko Miguchi, Atsuo Kawamura and Richard G.Hoft.Optimal Pole Assignment for Power Electronic Systems.IEEE-PESC'85.74~88