PWM原理
脉冲宽度调制波通常由一列占空比不同的矩形脉冲构成,其占空比与信号的瞬时采样值成比例。下图所示为脉冲宽度调制系统的原理框图和波形图。该系统有一个比较器和一个周期为Ts的锯齿波发生器组成。语音信号如果大于锯齿波信号,比较器输出正常数A,否则输出0。因此,从图中可以看出,比较器输出一列下降沿调制的脉冲宽度调制波。
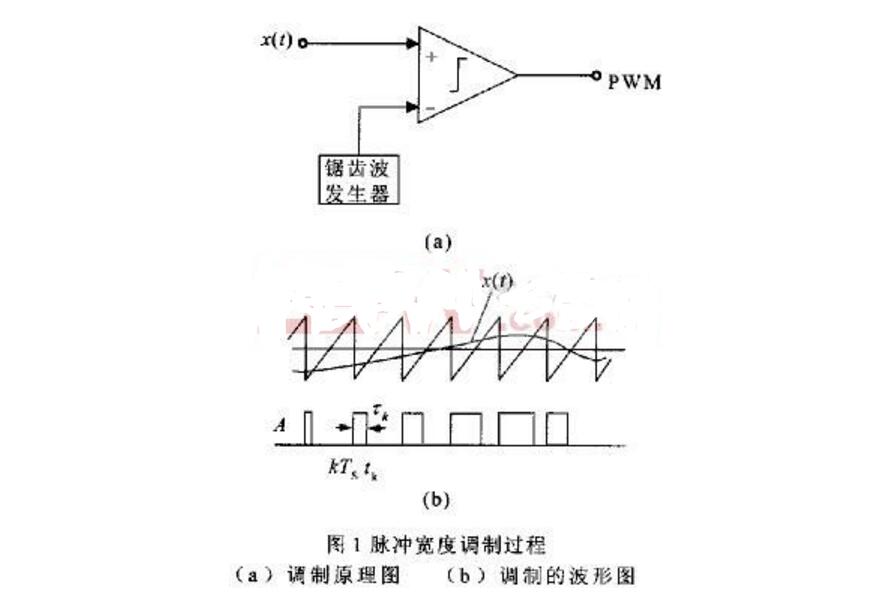
通过图b的分析可以看出,生成的矩形脉冲的宽度取决于脉冲下降沿时刻tk时的语音信号幅度值。因而,采样值之间的时间间隔是非均匀的。在系统的输入端插入一个采样保持电路可以得到均匀的采样信号,但是对于实际中tk-kTs《《的情况,均匀采样和非均匀采样差异非常小。如果假定采样为均匀采样,第k个矩形脉冲可以表示为:

其中,x{t}是离散化的语音信号;Ts是采样周期;是未调制宽度;m是调制指数。
然而,如果对矩形脉冲作如下近似:脉冲幅度为A,中心在t=kTs处,在相邻脉冲间变化缓慢,则脉冲宽度调制波xp(t)可以表示为:

其中,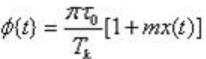 。无需作频谱分析,由式(2)可以看出脉冲宽度信号由语音信号x(t)加上一个直流成分以及相位调制波构成。当
。无需作频谱分析,由式(2)可以看出脉冲宽度信号由语音信号x(t)加上一个直流成分以及相位调制波构成。当 时,相位调制部分引起的信号交迭可以忽略,因此,脉冲宽度调制波可以直接通过低通滤波器进行解调。
时,相位调制部分引起的信号交迭可以忽略,因此,脉冲宽度调制波可以直接通过低通滤波器进行解调。
PWM分类
从调制脉冲的极性看,PWM又可分为单极性与双极性控制模式两种 。
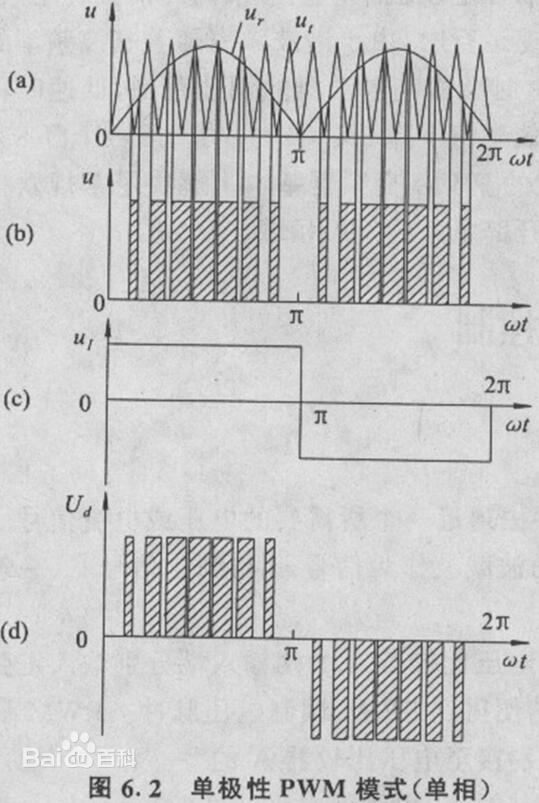
产生单极性PWM模式的基本原理如图6.2所示。首先由同极性的三角波载波信号ut。与调制信号ur,比较(图6.2(a)),产生单极性的PWM脉冲(图6.2(b));然后将单极性的PWM脉冲信号与图6.2(c)所示的倒相信号UI相乘,从而得到正负半波对称的PWM脉冲信号Ud,如图6.2(d)所示 。双极性PWM控制模式采用的是正负交变的双极性三角载波ut与调制波ur,如图6.3所示,可通过ut与ur,的比较直接得到双极性的PWM脉冲,而不需要倒相电路。
PWM信号产生电路图
开关电源他激控制方式有脉宽调制(PWM)和脉频调制(PFM),其中,大部分都采用PWM方式,因此,现简介PWM控制原理。图所示为PWM信号产生电路框图及工作波形,其工作过程如下:对被控制电压Uo。进行检测所得的反馈电压Ur加至放大器Al的同相输入端,固定的参考电压Uo加至A1的反相输入端。经A1放大后的直流误差电压Ue加至比较器A2的反相输入端,由固定频率振荡器产生的锯齿波信号Usa加至A2的同相输入端。A2输出方波信号,其占空比随误差电压而变化,即实现了脉宽调制。对于单管变换器,A2输出的PWM信号即可作为控制功率晶体管的开关信号,对于推挽或桥式等功率变换电路,则应将PWM信号分为两组信号,即分相。分相电路由触发器及两个“与”门组成,触发器的时钟信号对应于锯齿波的下降沿。A端和B端输出两组相差180°的PWM信号。

(a)PWM信号产生电路框图;(b)工作波形
图 PWM信号产生电路框图及工作波形
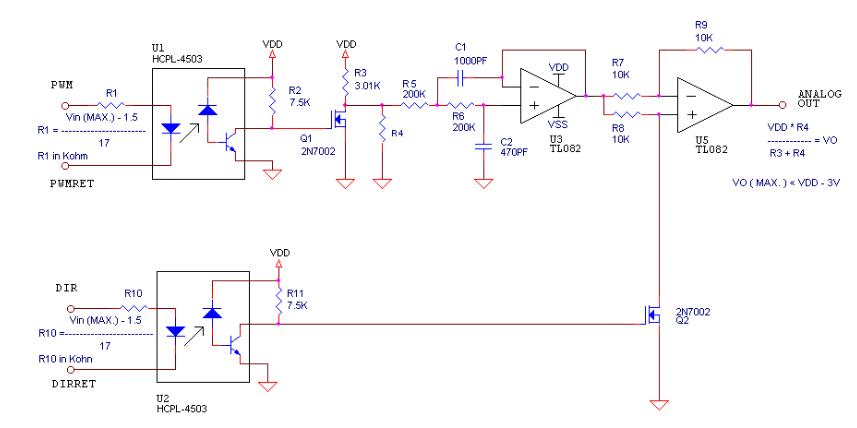
PWM转换为模拟量电压的电路
一些应用程序要求在运动控制器和信号放大器之间有一个PWM和方向接口。一个典型的界面包括两对线:一对确定方向,另一对是PWM调制的振幅参考。
本应用程序说明的目的是为设计工程师提供一个测试的和经过验证的示意图,将PWM和方向格式的解调转换为单个的模拟量电压信号。
电路规格:
输入信号:20KHz -输入频率可从15 kHz变化到50 kHz(为了降低频率,过滤器必须改变)。
最大输出:
供应:
传播延迟时间(4503年HCPL):<1us
带宽:>2kHz
电流消耗:<15ma
电阻精度: