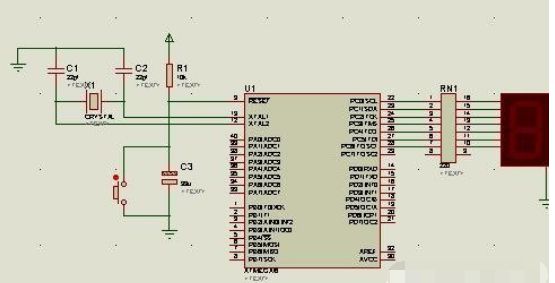
//数码管数据P0口,数码管控制P2口
#include
#include
#include
#include
#include
#define code PROGMEM
#define uchar unsigned char
#define uint unsigned int
code const ucharLED_7[16] = {0x28, 0x7E, 0xA2, 0x62, 0x74, 0x61, 0x21, 0x7A, 0x20, 0x60,0xff};//common of +
code const uchar position[8] = {0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe};
ucharTIme[4]; //时间计数
volaTIle uchar disp_buff[8]; //显示缓冲区
volaTIle ucharTIme_count = 0;
volatile uchar point_on = 0;
volatile uchar posit = 0;
volatile uchar time_10ms_ok = 0;
void time_to_dispbuff(void);
void time1_init(void);
void time0_init(void);
void display(void);
int main(void)
{
PORTA = 0xff;
DDRA = 0xff;
PORTC = 0xff;
DDRC = 0xff;
time[0] = 00;//1/10sec
time[1] = 30;//sec
time[2] = 59;//minute
time[3] = 23;//hour
time_to_dispbuff();
time1_init();
sei();
while(1)
{
if(time_10ms_ok)
{
time_10ms_ok = 0;
if(++time[0]》=100)
{
time[0] = 0;
point_on = ~point_on;
if(++time[1]》=60)
{
time[1] = 0;
if(++time[2]》=60)
{
time[2] = 0;
if(++time[3]》=24)
{
time[3] = 0;
}
}
}
}
time_to_dispbuff();
}
}
}
void time0_init(void)
{
TCCR0 = 0x05;
TCNT0 = 0xea;
TIFR |= 0x02;
TIMSK |= 0x02;
}
void time1_init(void)
{
TCCR1A = 0x00;
TCCR1B = 0x01;
TCNT1 = 0xa99a;
//TCNT1H = 0xa9;
//TCNT1L = 0x9a;
TIFR |= 0x80;
TIMSK |= 0x80;
}
SIGNAL(SIG_OVERFLOW1)
{
TCNT1 = 0xa99a;
display();
if(++time_count 》=5)
{
time_10ms_ok = 1;
time_count = 0;
}
}
void display(void)
{
PORTC = 0xff;
PORTA = pgm_read_byte(&led_7[disp_buff[posit]]);
if(point_on && ((posit==2)||(posit==4)||(posit==6)))PORTA &= 0x7f;
PORTC = pgm_read_byte(&position[posit]);
if(++posit》=8)posit = 0;
}
void time_to_dispbuff(void)
{
uchar i,j=0;
for(i=0;i《=3;i++)
{
disp_buff[j++] = time[i]%10;
disp_buff[j++] = time[i]/10;