摘要:针对多传感器环境的条件提出了一种基于神经网络补偿的航迹融合方法。各传感器的测量值用线性卡尔曼滤波器进行处理并将获得的局部航迹传送到融合中心。首先对局部航迹进行融合,然后引入神经网络来减少因共同过程噪声而导致的融合估计误差,其中神经网络采用DanSi2mon提出的网络结构,并对神经网络权值的优化采用无痕卡尔曼滤波(UKF)。仿真结果表明,这种融合方法对跟踪具有过程噪声的目标非常有效,而且过程噪声发生变化时该方法仍是有效的,从而使得它在很多实际应用中具有潜在的价值。
关键词:航迹融合;多传感器;径向基函数神经网络;无痕卡尔曼滤波
近年来随着多传感器设备的广泛使用,多传感器融合或数据融合已经受到越来越多的关注。目前,多传感器数据融合主要有两种方法:测量融合和航迹融合。测量融合是将传感器的测量值进行组合并获得目标状态向量的最优估计,这种方法的主要缺陷在于它需要传感器的测量值并且集中式方法缺乏鲁棒性。另外,传感器的测量值可能属于不同类型(比如红外,雷达等),而要同时处理这些不同类型的测量值则是非常困难的。因此,在很多的实际应用场合均使用航迹融合方法,每一个传感器都应用一个估计器来获取目标的状态向量及其协方差矩阵,并将其通过数据链传送到融合中心,在融合中心进行航迹关联和航迹融合从而获得更精确的目标状态向量。
在航迹融合方法里,Singer等首先提出了简单融合算法(SF)。它假定来自不同传感器的同一目标的航迹估计误差是不相关的,而实际上,这种假设:不成立,因为对各个估计器的滤波动态来说,由目标机动导致的过程噪声是共同的。为了消除不同航迹间的关联,Bar-Shalom等提出了加权方差融合方法(WCF),结果表明在协方差为正定的情况下,这种融合方法相对于简单融合方法的性能有很大幅度的提高,但是在非正定的情况下,加权方差融合方法的性能却下降了,甚至比简单融合方法还要差,另外,对交互协方差的计算也非常复杂。为了减少计算负担,Celine提出了一种自适应航迹融合方法。这种方法的要点在于它有一个决策逻辑,即通过距离矩阵和门限的比较来选择简单融合或加权方差融合,以获得全局估计。但由于过程噪声的存在,大多数情况下仍然需要使用加权方差融合方法,无法避免计算交互协方差。稳定状态下交互式协方差的解析解可通过离散李亚普诺夫方程来求解,Saha通过引入双线性变换转化交互式协方差矩阵方程并通过积分求解而大大降低了计算负担。但是这些方法对于二维状态向量的融合是适合的,对于更复杂或更高维的航迹融合却不适合。
本文针对2条航迹融合的问题提出了一种基于神经网络补偿的航迹融合方法。该方法不直接计算交互式协方差,而是补偿因交互式协方差而导致的融合误差。并通过跟踪实例,对所提出方法的可行性进行了验证。
数学模型
所跟踪目标的动态模型为
![]()
式中X(k)=[x(k)x(k)y(k)y(k)]T为状态向量Φ,G分别为状态矩阵和转移矩阵;输入噪声w(k)为零均值高斯白噪声,其方差 。观测值为距离r和角度θ,它们的标准方差分别表示为σr和σθ,将其转化到笛卡尔坐标系下,x=rcosθ和y=rsinθ,这时测量方程为
。观测值为距离r和角度θ,它们的标准方差分别表示为σr和σθ,将其转化到笛卡尔坐标系下,x=rcosθ和y=rsinθ,这时测量方程为
式中,vm(k)为笛卡尔坐标系下的测量噪声,它与过程噪声w(k)是相互独立的,假定其为零均值高斯白噪声且其方差矩阵为:

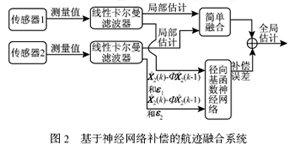
融合系统结构如图1所示。2个传感器跟踪同一目标,融合中心的目的在于将2个跟踪器的输出进行融合而得到更精确的估计值,本文不考虑配准和航迹关联问题,并且假定整个系统是可观测的。

目标状态估计可从以下的卡尔曼滤波方程得出:
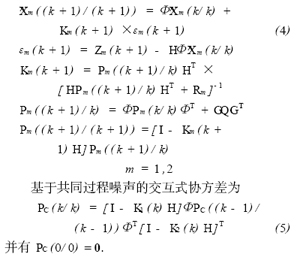
假定从2个传感器来的航迹是同步的,否则在融合之前,这些航迹都必须进行时间配准。不考虑交互式协方差的简单融合方法为
其方差矩阵可表示为
![]()
由于共同过程噪声的存在,各个航迹之间其实是相关的,因此上述方法是次优的。本文将引入神经网络来减少由过程噪声所导致的估计误差。
基于神经网络补偿的航迹融合
本文提出一种神经网络补偿的方法来提高航迹融合的性能,从而提高跟踪的精确度。该方法的基本结构如图2所示,在融合中心首先对各个传感器的输出进行简单融合,然后引入径向基函数(RBF)神经网络辅助简单融合来减少因交互式协方差或模型变化所引起的估计误差。这里神经网络的训练采用4个输入信号2个为局部航迹的残余误差(εm(k),m=1,2),2个为传感器的当前状态估计值与当前状态预测值之差(^Xm(k)-Φ^Xm(k-1),m=1,2)。
对神经网络输入的选择主要基于以下的考虑:从式(12)可知,交互式协方差主要是同卡尔曼滤波器的增益Km(k)相关,而由式(4)知Km(k)可由滤波器的残差矩阵及^Xm(k)和Φ^Xm(k-1)之间的差值获得,另外神经网络的输入Km(k)和^Xm(k)-Φ^Xm(k-1)都是和过程噪声相关的。
因为就仿真而言目标的真实状态是已知的,因此,神经网络的优化可使用误差(真实状态和基于简单融合的目标状态估计之间的差值)来训练神经网络:
![]()
径向基函数神经网络
神经网络状态方程
在简单融合的基础上引入RBF神经网络来补偿状态估计的误差,网络结构参见文献,其网络的输入输出方程可表示如下:
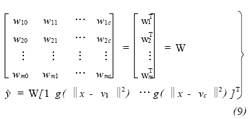
式中:g(·)为隐层函数;c为隐层节点数;vi(i=1,2,…,c)为阈值;W为神经网络隐层和输出层之间的连接权值。如果有M组输入输出训练集{xi,yi}(i=1,2,…,M),则可以将式(9)扩展成如下形式:

式中,η(k)和λ(k)为附加的过程噪声。Simon用扩展卡尔曼滤波来进行状态估计并优化非线性系统。而无痕卡尔曼滤波(UKF)用一种新的均值和方差的参数化表示方法并直接传递到系统方程用来预测均值和方差,这种方法相对于扩展卡尔曼滤波来说更精确也更易于实现。因此,本文使用无痕卡尔曼滤波来进行系统的优化。
基于UKF的径向基函数神经网络优化
本文神经网络的输出为误差E,将其作为观测值,并假定s(k)为n维的状态向量,其均值为



仿真实例
为了证明本文方法的有效性,讨论一个2传感器4维状态向量估计融合的情况。假定目标的动态矩阵及输入矩阵如下:
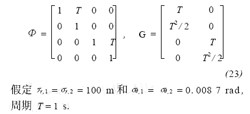
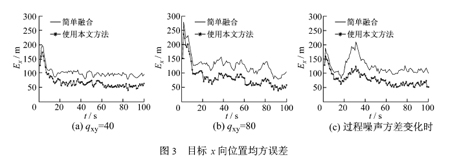
图3(a),(b)都表明在模型不变(过程噪声方差保持不变)时,本文提出的方法比简单融合方法的效果要好,并且过程噪声方差越大,简单融合的效果就越差,而本文方法则能很好地消除过程噪声所引起的估计误差。图3(c)表明过程噪声发生突变时,简单融合方法不能很好地保持跟踪性能,而本文方法通过神经网络对过程噪声所引起的估计误差进行补偿而达到较好的跟踪效果。
结语
该方法能处理多传感器环境下因共同过程噪声而导致的具有交互式协方差的航迹融合问题,而无须计算交互式协方差,取而代之以神经网络对融合误差进行补偿,神经网络的优化采用UKF方法,从而大大降低了计算量。计算机仿真表明,这种方法不仅能很好地跟踪具有过程噪声的目标,而且当目标模型有所变化(过程噪声发生突变)时,它仍能进行有效的处理,这使得它在很多实际应用场合具有潜在的使用价值。