本文介绍了关于8051微控制器引脚图、引脚说明以及其他一些细节内容,包括8051微控制器的基本电路。
当然,首先来介绍8051微控制器引脚图和引脚说明,这样会更容易理解8051微控制器架构,因为设备的引脚图或引脚输出将指定电连接器的引脚及其功能。
8051微控制器引脚图
众所周知,8051微控制器有多种封装形式,如40引脚DIP或44引脚PLCC和TQFP。8051 微控制器的引脚方向可能会随封装而变化,但引脚配置是相同的。
下图显示了40引脚双列直插式封装 (DIP) 的8051微控制器引脚图:
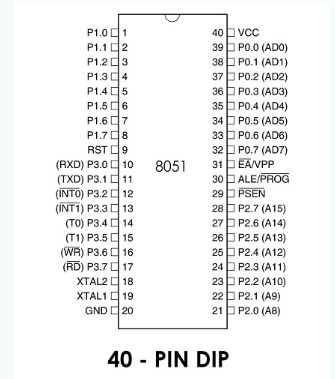
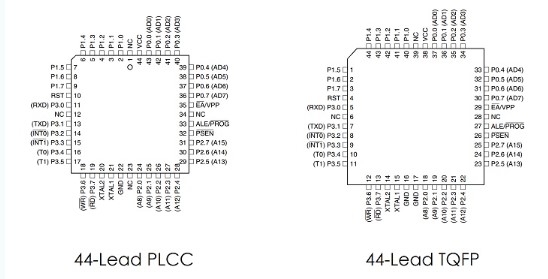
由于它是一个40-pin DIP IC,每边包含20个Pin。此外,还有8051的其他封装,例如44-LeadPLCC和44-Lead TQFP。下图显示了这些封装的8051微控制器引脚图:
上图可以详细看到8051微控制器引脚图,而现在需要了解这些引脚的功能,这将是接下来所要介绍的内容。
8051微控制器引脚说明
8051微控制器的引脚说明或引脚配置将描述 8051微控制器的每个引脚的功能。
引脚1 – 8 (端口1):引脚1到8是8051的端口1引脚。端口1引脚由8位双向输入/输出端口和内部上拉电阻组成。在较旧的8051微控制器中,端口1没有任何其他用途,而只是8位I/O端口。而在一些较新的8051微控制器中,很少有端口1引脚具有双重功能。P1.0和P1.1分别作为定时器2和定时器2触发输入。
P1.5、P1.6和P1.7分别用作系统内编程引脚,即MOSI、MISO和SCK。
引脚9 (RST):引脚9是复位输入引脚。它是一个高电平有效引脚,即如果RST引脚为高电平至少两个机器周期,微控制器将被复位。在此期间,振荡器必须运行。
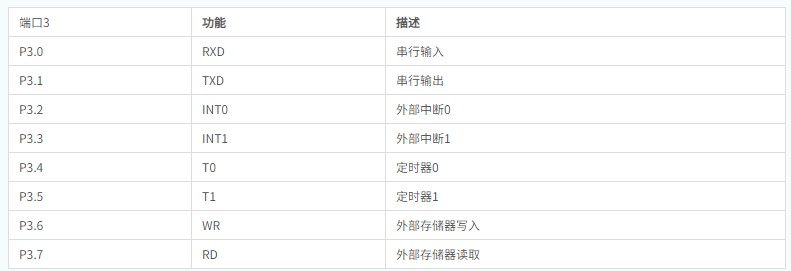
引脚10 – 17 (端口3):引脚10到17构成8051微控制器的端口3引脚。端口3还用作带有内部上拉电阻的双向输入/输出端口。此外,所有端口3引脚都有特殊功能。下表给出了端口3引脚的附加功能的详细信息。
引脚18和19:引脚18和19即XTAL 2和XTAL 1,是连接外部振荡器的引脚。通常,这里连接一个石英晶体振荡器。
引脚20 (GND):引脚20是8051微控制器的接地引脚。它代表0V并连接到电源的负极端子 (0V)。
引脚21 – 28(端口2):这些是8051微控制器的端口2引脚。端口2也是一个双向端口,即所有端口2引脚都用作输入或输出。此外,当连接外部存储器时,端口2引脚用作高位地址字节。端口2引脚具有内部上拉电阻。
引脚29 ( PSEN ):引脚29是程序存储使能引脚 ( PSEN )。使用该引脚,可以读取外部程序存储器。
引脚30 (ALE/ PROG ):引脚30是地址锁存启用引脚。使用该引脚,可以将外部地址与数据分离(因为它们被 8051 复用)。在Flash编程期间,该引脚用作编程脉冲输入 ( PROG )。
引脚31 ( EA /VPP):引脚31是外部访问使能引脚,即允许外部程序存储器。只有当该引脚为低电平时,才能从外部程序存储器中获取代码。对于正常操作,该引脚被拉高。在Flash编程期间,该引脚接收 12V编程使能电压 (VPP)。
引脚32 – 39(端口0):引脚32至39是端口0引脚。它们也是双向输入/输出引脚,但没有任何内部上拉电阻。因此,需要外部上拉电阻才能将端口0引脚用作I/O端口。另外,除了作为I/O端口外,端口0在访问外部存储器时还作为低位地址/数据总线。
引脚40 (VCC):引脚40是提供电源电压 (+5V) 的电源引脚。
8051微控制器基本电路
上面已经介绍8051微控制器的引脚图和相应的引脚说明,接下来看看8051微控制器的基本电路或原理图。下图显示了8051微控制器的基本电路:
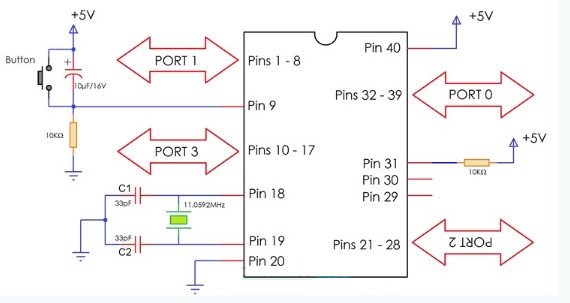
8051微控制器的这个基本电路是它工作所需的最小接口。基本电路包括复位电路、振荡电路和电源,下面详细的介绍下。
首先是电源,8051微控制器的引脚40和20(VCC 和 GND)分别连接到+5V和GND。
接下来是复位电路,复位引脚上的逻辑高电平(+5V)至少两个机器周期(24个时钟周期)将复位8051微控制器。8051微控制器的复位电路由一个电容、一个电阻和一个按钮组成,这种复位电路提供了手动复位选项。如果移除按钮,则复位电路变成上电复位电路。
下一部分是振荡器电路或时钟电路。石英晶体振荡器连接在XTAL1和XTAL2引脚(即引脚19和18)之间。电容C1和C2可以在20pF到40pF的范围内选择。
正如在8051微控制器引脚说明中所述,端口1、2和3都具有内部上拉电阻,因此可以直接用作双向I/O端口。但是,需要为PORT 0引脚添加外部上拉,以便将其用作I/O端口。
通常情况下,8个电阻的1KΩ电阻包用作8051微控制器端口0的上拉电阻。
总结
以上就是关于8051微控制器的引脚图、引脚说明和8051微控制器的基本电路基础知识内容。不难发现,8051单芯片是同步式的顺序逻辑系统,整个系统的工作完全是依赖系统内部的时脉信号,用以来产生各种动作周期及同步信号。