如果要比较精确地计算和绘制极坐标图,一般来说是比较麻烦的,为此可用频率特性的另一种图示法:对数坐标图。对数坐标图法不但计算简单,绘图容易,而且能直观地表现开环增益、时间常数等参数变化对系统性能的影响。
一般对数坐标图由两部分组成:一张是对数幅频特性图,它的纵坐标为![]() ,单位是分贝,用符号dB表示。通常为了书写方便,把
,单位是分贝,用符号dB表示。通常为了书写方便,把![]() 用符号
用符号![]() 表示。另一张是相频图。两张图的纵坐标都是按线性分度,单位分别为dB和
表示。另一张是相频图。两张图的纵坐标都是按线性分度,单位分别为dB和![]() ,横坐标是角频率
,横坐标是角频率![]() 。
。
为了更好地体现开环系统各频段的特性,可对横坐标采用![]() 的对数坐标分度,从而形成了半对数坐标系。这对于扩展频率特性的低频段,压缩高频段十分有效。在以
的对数坐标分度,从而形成了半对数坐标系。这对于扩展频率特性的低频段,压缩高频段十分有效。在以![]() 分度的横坐标上,1到10的距离等于10到100的距离,这个距离表示十倍频程,用符号dec表示。对数幅频特性的“斜率”一般用分贝/十倍频(dB/dec)表示。对数坐标图又称伯德图(Bode图)。
分度的横坐标上,1到10的距离等于10到100的距离,这个距离表示十倍频程,用符号dec表示。对数幅频特性的“斜率”一般用分贝/十倍频(dB/dec)表示。对数坐标图又称伯德图(Bode图)。
用伯德图表示的频率特性有如下的优点:
1)把幅频特性的乘除运算转变为加减运算。
2)在对系统作近似分析时,一般只需要画出对数幅频特性曲线的渐近线,从而大大简化了图形的绘制。
3)用实验方法,将测得系统(或环节)频率响应的数据画在半对数坐标纸上。根据所作出的曲线,容易估计被测系统(或环节)的传递函数。
在Matlab控制工具箱中,亦有专门的函数用于绘制Bode图:Bode函数。同时为绘制开环系统的幅频特性的渐近线,我们编制了画渐近线的作图函数:Bode_asymp。有关它们的使用方法将结合例题进行说明。
5.3.1 典型环节的伯德图
1.比例环节
比例环节K的对数幅频特性是一高度为 dB的水平线,它的相角为零度,如图5-18所示。改变开环频率特性表达式中K的大小,会使对数幅频特性升高或降低一个常量,但不影响相角的大小。
![]() (5-37)
(5-37)
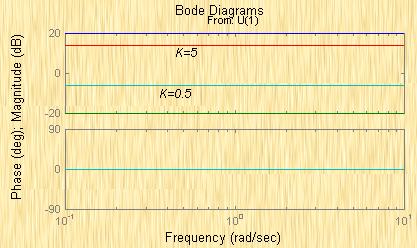
图5-18 比例环节K的对数幅频特性
显然,当![]() 时,
时,![]() 位于横轴上方;当
位于横轴上方;当![]() 时,
时,![]() 位于横轴上;当
位于横轴上;当![]() 时,
时,![]() 位位于横轴下方。
位位于横轴下方。
2.一阶环节![]()
一阶环节![]() 的对数幅频和相频表达式分别为
的对数幅频和相频表达式分别为
 (5-38)
(5-38)![]() (5-39)其中
(5-39)其中![]() 。
。
当![]() 时,略去式(5-38)中的1,则得
时,略去式(5-38)中的1,则得![]() ,表示
,表示![]() 高频部分的渐近线是一条斜率为-20dB/dec的直线,当输入信号的频率每增加十倍频程时,对应输出信号的幅值便下降20dB。图5-19所示的是精确对数幅频特性及其渐近线和精确的相频曲线,其中T=1,Matlab命令如下:
高频部分的渐近线是一条斜率为-20dB/dec的直线,当输入信号的频率每增加十倍频程时,对应输出信号的幅值便下降20dB。图5-19所示的是精确对数幅频特性及其渐近线和精确的相频曲线,其中T=1,Matlab命令如下:
G=tf(1,[1,1]);
[x0,y0,w]=bode(g),[x,y]=bode_asymp(g,w);
subplot(211),semilogx(w,20*log10(x0(:)),x,y)
subplot(212),semilogx(w,y0(:))
不难看出,两条渐近线相交点的频率![]() ,这个频率称为转折频率,又名转角频率。如果
,这个频率称为转折频率,又名转角频率。如果![]() 环节的对数幅频特性能用其两条渐近线似表示,则使作图大为简化。问题是,这种近似表示所产生的误差有多大?
环节的对数幅频特性能用其两条渐近线似表示,则使作图大为简化。问题是,这种近似表示所产生的误差有多大?
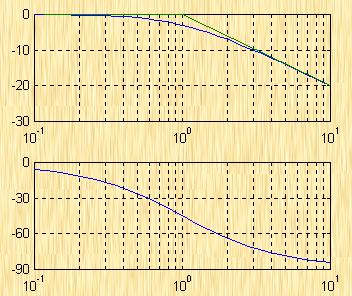
图5-19 一阶惯性环节频率特性
由图5-19可见,最大的幅值误差产生在转折频率![]() 处,它近似等于-3dB-22a和5 -22b。如果传递函数中含有
处,它近似等于-3dB-22a和5 -22b。如果传递函数中含有![]() 个积分环节,即
个积分环节,即![]() ,则它的对数幅频和相频表达式可分别写成
,则它的对数幅频和相频表达式可分别写成
 (5-41)
(5-41)![]() (5-42)
(5-42)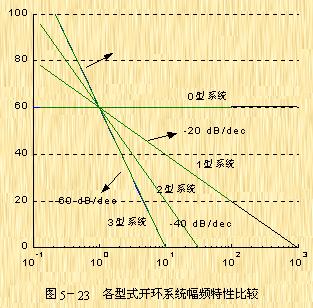
式(5-41)所示的是一簇斜率为![]() 的直线,且在
的直线,且在![]() 处,
处,![]() ,如图5-23所示。由式(5-41)求得,这些不同斜率的直线通过0dB-44)中的1和
,如图5-23所示。由式(5-41)求得,这些不同斜率的直线通过0dB-44)中的1和![]() 项,则得
项,则得
![]()
上式表示![]() 的高频渐近线为一斜率
的高频渐近线为一斜率![]() 的直线。不难看出,两条渐近线相交于
的直线。不难看出,两条渐近线相交于![]() 。
。![]() 称为振荡环节的转折频率。基于实际的对数幅频特性既与频率
称为振荡环节的转折频率。基于实际的对数幅频特性既与频率![]() 和
和![]() 有关,又与阻尼比
有关,又与阻尼比![]() 有关,因而这种环节的对数幅频特性曲线一般不能用其渐近线近似表示,不然会引起较大的误差。图5-25所示。由图可见,
有关,因而这种环节的对数幅频特性曲线一般不能用其渐近线近似表示,不然会引起较大的误差。图5-25所示。由图可见,![]() 值越小,对数幅频曲线的峰值就越大,它与渐近线之间的误差也就越大。
值越小,对数幅频曲线的峰值就越大,它与渐近线之间的误差也就越大。
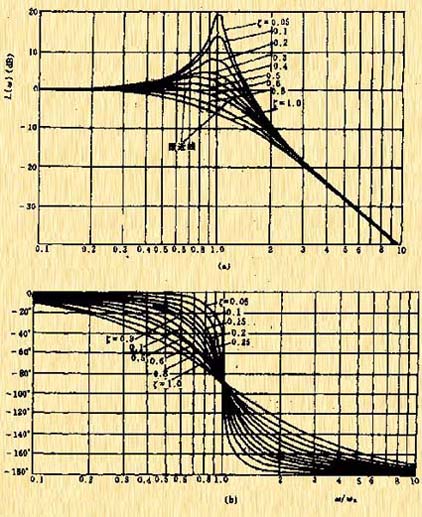 图5-24二阶振荡环节的对数幅频特、渐近线和相角曲线
图5-24二阶振荡环节的对数幅频特、渐近线和相角曲线
将式(5-43)的幅值表达式写为
 (5-45)
(5-45)
令
![]() (5-46)
(5-46)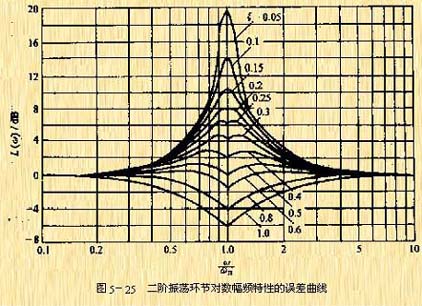
显然,如在某一频率时,![]() 有最小值,则
有最小值,则![]() 便有最大值。把式(5-46)改写为
便有最大值。把式(5-46)改写为
 (5-47)
(5-47)
下面针对不同的![]() 值范围,讨论在什么条件下,式(5-44)会有峰值出现,这个峰值和相应的频率应如何计算。
值范围,讨论在什么条件下,式(5-44)会有峰值出现,这个峰值和相应的频率应如何计算。
(1)![]() 时
时
从式(5-47)中看出,当![]() 时,
时,![]() 有最小值,即
有最小值,即![]() 有最大值,这个最大值称为谐振峰值,用
有最大值,这个最大值称为谐振峰值,用![]() 表示之。基于
表示之。基于![]() 值为
值为![]() ,由式(5-26所示。产生谐振峰值时的频率叫谐振频率,用
,由式(5-26所示。产生谐振峰值时的频率叫谐振频率,用![]() 表示,它的值为
表示,它的值为
![]()
![]()
由上式可见,当![]() 趋于零时,
趋于零时,![]() 就趋向于
就趋向于![]() 。当
。当![]() 时,
时,![]() 总小于有阻尼自然频率
总小于有阻尼自然频率![]() 。
。
(2)![]() 时
时
此时可将式(5-46)改写为
 (5-49)
(5-49)
不难看出,由于![]() 随着
随着![]() 的增大而增大,因而
的增大而增大,因而![]() 随着
随着![]() 的增大而单调地减小。这意味着,当
的增大而单调地减小。这意味着,当![]() 时,幅值曲线不可能有峰值出现,即不会产生谐振。当
时,幅值曲线不可能有峰值出现,即不会产生谐振。当![]() 时,
时,![]() 有最小值,其值为期1
有最小值,其值为期1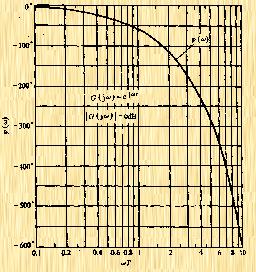
图5-27时滞系统的相频特性
5.3.2 开环系统的伯德图
设系统的开环传递函数为
![]()
则其对应的对数幅频和相频特性分别为

因此,只要作出![]() 所含各环节的对数幅频和相频特性曲线,然后对它们分别进行代数相加,就能求得开环系统的伯德图。
所含各环节的对数幅频和相频特性曲线,然后对它们分别进行代数相加,就能求得开环系统的伯德图。
一般绘制开环系统伯德图的步骤如下:
(1)写出开环频率特性的表达式,将其写成典型环节相乘的形式。
(2)将所含各环节的转折频率由小到大依次标准在频率轴上。注意,由于比例环节和积分环节没有转折频率,因此可以排在最左边。
(3)绘制开环对数幅频曲线的渐近线。渐近线由若干条分段直线所组成,其低频段的斜率为![]() ,其中
,其中![]() 为积分环节数。在
为积分环节数。在![]() 处,
处,![]() 。以低频段作为分段直线的起始段,从它开始,沿着频率增大的方向,每遇到一个转折频率就改变一次分段直线的斜率。如遇到
。以低频段作为分段直线的起始段,从它开始,沿着频率增大的方向,每遇到一个转折频率就改变一次分段直线的斜率。如遇到![]() 环节的转折频率
环节的转折频率![]() ,当
,当![]() 时,分段直线斜率的变化量为
时,分段直线斜率的变化量为![]() ;如遇到
;如遇到![]() 环节的转折频率
环节的转折频率![]() ,当
,当![]() 时,分段直线斜率的变化量为
时,分段直线斜率的变化量为![]() ,其它环节用类似的方法处理。分段直线最后一段是开环对数幅频曲线的高频渐近线,其斜率为
,其它环节用类似的方法处理。分段直线最后一段是开环对数幅频曲线的高频渐近线,其斜率为![]() ,其中n为
,其中n为![]() 的零点数。
的零点数。
(4)作出以分段直线表示的渐近线后,如果需要,再按照前述的各典型环节的误差曲线对相应的分段直线进行修正,就可得到实际的对数幅频特性曲线。
(5)作相频特性曲线。根据开环相频特性的表达式,在低频、中频及高频区域中各选择若干个频率进行计算,然后连成曲线。
例5-4试绘制开环系统的伯德图 ...
已知一反馈控制系统的开环传递函数为
![]()
试绘制开环系统的伯德图。
解 系统的开环频率特性为
由此可知,该系统是由比例、积分、微分和惯性环节所组成。它的对数幅频特性为
![]()
按上述的步骤,作出该系统对数幅频特性曲线的渐近线,其特点为
1)由于![]() ,因而渐近线低频段的斜率为
,因而渐近线低频段的斜率为![]() 。在
。在![]() 处,其高度为
处,其高度为![]() 。
。
2)当![]() 时,由于惯性环节对信号幅值的衰减任用,使分段直线的斜率由
时,由于惯性环节对信号幅值的衰减任用,使分段直线的斜率由![]() 变为
变为![]() 。同理,当
。同理,当![]() 时,由于微分环节对信号幅值的提升任用,使分段直线的斜率上升
时,由于微分环节对信号幅值的提升任用,使分段直线的斜率上升![]() ,即由
,即由![]() 变为
变为![]() 。
。
系统的相频特性按式:![]() 进行计算。
进行计算。
上述作图过程同样可使用如下的Matlab语句绘制Bode图方法。
%ex5_4
funcTIon ex5_4
G=tf(10*[0.1,1],conv([1,0],[0.5,1]));%得到传递函数
[x0,y0,w]=bode(G);%由Bode函数获取幅值和相角
[x,y]=bode_asymp(G,w);%得到转折频率
subplot(211),semilogx(w,20*log10(x0(:)),x,y);%画幅频曲线和渐近线
subplot(212),semilogx(w,y0(:))%现相频曲线
图5-28为该系统的伯德图。
的相位变化量为![]() ,系统b-29所示,相应的单位阶跃响应如图5-30。由图可见,最小相位系统的对数幅频特性和相频特性曲线的变化趋势基本相一致,这表明它们之间有着一定的内在关系。可以证明,如果确定了最小相位系统的对数幅频特性,则其对应的相频特性也就被唯一地确定了。反之,亦然。因此对于最小相位系统,只要知道它的对数幅频特性曲线,就能估计出系统的传递函数。对于非最小相位系统,它的对数幅频和相频特性曲线的变化趋势并不完全相一致,两者之间不存在着唯一的对应关系。因此对于非最小相位系统,只有同时知道了它的对数幅频和相频特性曲线后,才能正确地估计出系统的传递函数。当
,系统b-29所示,相应的单位阶跃响应如图5-30。由图可见,最小相位系统的对数幅频特性和相频特性曲线的变化趋势基本相一致,这表明它们之间有着一定的内在关系。可以证明,如果确定了最小相位系统的对数幅频特性,则其对应的相频特性也就被唯一地确定了。反之,亦然。因此对于最小相位系统,只要知道它的对数幅频特性曲线,就能估计出系统的传递函数。对于非最小相位系统,它的对数幅频和相频特性曲线的变化趋势并不完全相一致,两者之间不存在着唯一的对应关系。因此对于非最小相位系统,只有同时知道了它的对数幅频和相频特性曲线后,才能正确地估计出系统的传递函数。当![]() 时,虽然最小相位系统和非最小相位系统对数幅频特性的斜率均为
时,虽然最小相位系统和非最小相位系统对数幅频特性的斜率均为![]() ,但前者的相位
,但前者的相位![]() ,而后者的相位
,而后者的相位![]() 。这个特征可用于判别被测试的系统是否是最小相位系统。
。这个特征可用于判别被测试的系统是否是最小相位系统。
控制系统中的时滞环节是典型的非最小相位系统。关于此点无论从它的近似展开式或其完整形式均可证明。同时从图5-30可以明显看出,最小相位系统的稳态误差为零,而非最小相位系统则是发散的。因此,对于控制系统而言,相位滞后越大,系统的稳定性越差,因此应尽可能减小或避免时滞环节对控制系统的影响。
5.3.4系统开环对数幅频特性与闭环稳态误差的关系
对于一定的输入信号,控制系统的稳态误差与系统的类型和开环放大倍数有关。在给定了系统的开环幅频特性曲线后,即可根据其低频段的位置或斜率确定其稳态位置误差系数![]() 、速度误差系数
、速度误差系数![]() 和加速度误差系数
和加速度误差系数![]() 。对数幅频特性的低频段是由因式
。对数幅频特性的低频段是由因式![]() 来表征的,对于实际的控制系统,
来表征的,对于实际的控制系统,![]() 通常为0<span '>、1或2。下面分析系统的类型与对数幅频特性曲线低频渐近线斜率的对应关系及
通常为0<span '>、1或2。下面分析系统的类型与对数幅频特性曲线低频渐近线斜率的对应关系及![]() 、
、![]() 和
和![]() 值的确定。
值的确定。
1.0型系统
 图5-310型系统的对数幅频特性
图5-310型系统的对数幅频特性
设0型系统的开环频率特性为
则其对数幅频特性的表达式为
据此作出对数幅频特性曲线的渐近线如图5-31所示。由图可见,0型系统的对数幅频特性低频段具有如下特点:
1) 低频段的渐近线斜率为0 dB/dec,高度为![]() ;
;
2) 如果已知幅频特性低频段的高度,即可根据式:![]() 求出位置误差系数
求出位置误差系数![]() 的值,进而计算系统的稳态误差。
的值,进而计算系统的稳态误差。
2、I型系统
设I型系统的频率特性为
其对数幅频特性的表达式为

由上式作出的对数幅频特性曲线的渐近线如图5-32所示。
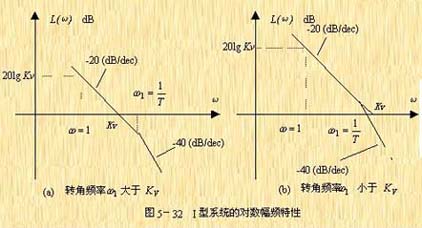
不难看出,I型系统的对数幅频特性有如下的特点:
1)低频渐近线的斜率为![]() 。
。
2)低频段渐近线(或其延长线)在![]() 处的纵坐标值为
处的纵坐标值为![]() ,由此可求出稳态速度误差系数
,由此可求出稳态速度误差系数![]() 。
。
3)开环增益即稳态速度误差系数![]() 在数值上也等于低频渐近线(或其延长线)与0dB线相交点的频率值。
在数值上也等于低频渐近线(或其延长线)与0dB线相交点的频率值。
3、Ⅱ型系统
设Ⅱ型系统的频率特性
其对数幅频特性的表达式为

由上式作出对数幅频特性曲线的渐近线如图5-33所示。易知,Ⅱ型系统的对数幅频特性有如下的特点:
1) 低频渐近线的斜率为![]() 。
。
2)和I型系统一样,低频渐近线(或其延长线)在![]() 处的纵坐标值为
处的纵坐标值为![]() 由此可求出稳态加速度误差系数
由此可求出稳态加速度误差系数![]() 。
。
3) 系统的开环增益即加速度误差系数![]() 在数值上也等于低频段渐近线(或其延长线)与0dB线相交点的频率值和平方。
在数值上也等于低频段渐近线(或其延长线)与0dB线相交点的频率值和平方。