1 引言
在项目开发中采用从英国进口的SRF05 超声波传感器,它的回波反馈与测距方式与通常使用的超声波传感器相比较特别, 在ARM中实现也稍有难度, 但该传感器精度很高可达到1cm, 因此用该传感器去掉了用于近距离测距的红外测距模块节约了硬件资源。
该机器人的最小系统为,触摸屏模块,超声波模块,摄像头图像采集模块,直流电机闭环控制系统,在整个系统中测距是最总要的一环,它直接影响电机运行距离的精度,在有效范围内的图像采集控制。整个系统都是在ARM9 与linux 平台中完成,每个模块都是用设备驱动的方式实现使得模块的控制更加方便。
2 SRF05 超声波测距方法
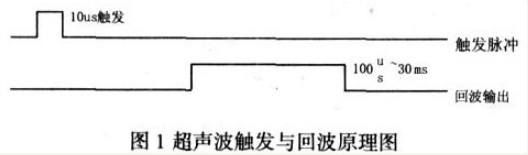
提供一个10us 的脉冲触发超声波传感器,SRF05 会发出8 个周期的频率为40khz 的超频脉冲,此时在echo 也是就回波口上的电平变为高,此时定时器开始计时,等到echo 变为低电平证明有障碍物此时停止计时,高脉冲的宽度有测距的距离成正比,该超声波的有效测距范围为1cm~4m, 因此如果没有障碍物或障碍物大于4m,echo 依然会变为低电平此时定时器的时间为30ms, 因此在测距时定时器的周期应大于30ms 这样才能有效测距。
原理如图1 所示。
3 超声波测距软件实现
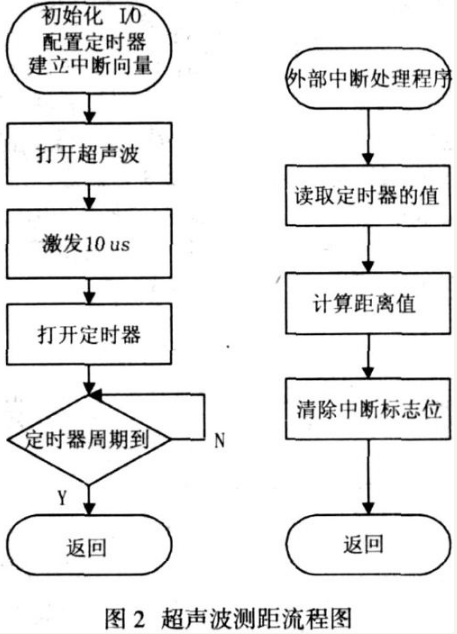
如图2 为超声波测距的流程图。
3.1 回波检测的采集方法
超声波的回波的检测是个难点, 因为在ARM中一个端口设置中断只能设置一种触发方式, 如果设为上升沿触发可以打开定时器定时但无法捕获下降沿,也就无法关闭定时器,从而不能测距, 因此用软件的方式实现。首先设置两个时间延迟函数usdelay()和msdelay(),这样可以在给出高脉冲10us 后等超声波触发再打开定时期计时,在设置一个外部中断eint1 接到超声波传感器的echo 口并设置为下降沿触发,等下降沿来临关闭定时器读出值既为脉宽的时间长度,然后根据障碍物的距离=(ECHO高电平的时间)* 声纳速度/2 得出距离。空气中v 与温度关系:v=331.5√1+T/273 m/s,T 为摄氏温度。一般情况下超声波速近似声速,在室内温度影响下取约343.2m/s.
3.2 超声波触发的实现
利用数字示波器精确设计一个软件计时函数usdelay (),具体实现如下。
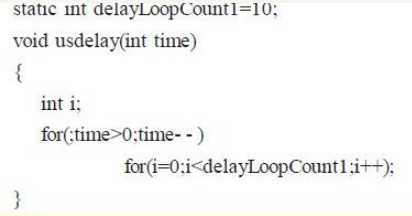
则usdelay(1)既为10us,该函数用于在给出激发高脉冲后延续10us 然后关脉冲。
还要设计一个msdelay()用于控制整个测距周期的时间值。
msdelay(1000)在主函数数中用于延迟1s,这样定时器可以完全有足够的回波检测时间同时也不会对其它三路超声波信号造成干扰。
如下所示。

3.3 超声波回波检测的实现
回波检测计算脉宽的时间需要用到定时器和外部中断,外部中断接超声波的echo 并设置为下降沿触发。定时器的初始化如下。
rTCFG0=0x9595; //预分频值为95
rTCFG1=0x00000; //分割值1/2
rTCNTB0=10000; /
根据T=[TCNTB0*(TCFG0+1)*(1/TCFG1)]/50MHZ 得出定时器的周期为60ms 在这个时间段里足以计算回波时间。
外部中断1 初始化如下
rGPFCON=0xaa; //GPF1 设置为EINT1
rINTMOD=0x0; //设置为普通中断
rGPFUP=0xf; //禁止GPF0 上拉电阻
pISR_EINT1=(unsigned)Eint1Handler; //建立中断向量
EnableIrq(BIT_EINT1); //使能中断
rEXTINT0 =0x492; // EINT1 下降沿触发
根据T=[TCNTB0*(TCFG0+1)*(1/TCFG1)]/50MHZ 得出定时器的周期为60ms 在这个时间段里足以计算回波时间。
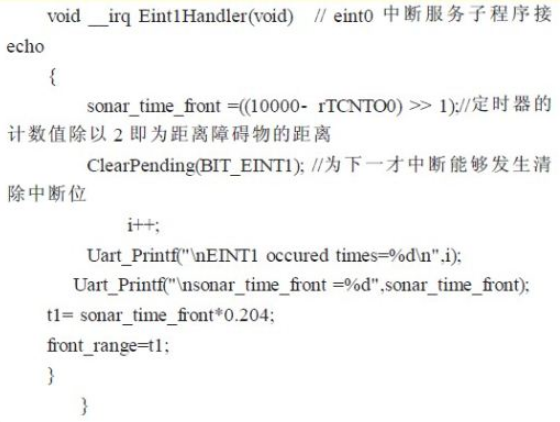
3.4 在外部中断中计算机距离
3.5 循环控制与轮询测距
由于超声波之间有干扰,采用轮询的方式依次打开超声波,每次只测一个,这样可以有效地避免干扰,为了提高实时性可以控制定时器周期,比如设置为35ms,这样四路超声波轮询一次大约为140ms,足以满足实时要求。
4 机器人控制的实现
图3 为利用超声波的反馈信息控制机器人直流电机闭环系统的总体结构图。

linux 系统中超声波传感器为只读的字符设备,具体应用为在应用程序下打开超声波设备,然后在驱动中测距,测得的数据传到应用程序,应用程序中有超声波的避障算法,根据算法判断障碍物的位置给直流电机控制信号进行避障导航。
触摸屏中的图形界面中含有机器人的指令设置, 可以设置运行速度,图像采集与超声波模块的打开与关闭,是否开启机器人模糊算法运行轨迹还是使用普通的PID 调节, 这使得机器人有很多种方案可以选择。
机器人的每一次行为都是根据超声波传感器测得的值和当前机器人运行的即时速度来来给出将要运行的时间, 在遇到障碍物时(0<t<30us 等于30 微秒时达到超声波的最大探测距离), 开启摄像头图像采集模块, 这时摄像头会拍下障碍物的图像,并利用无线MODEM把图像传回控制电脑,这样用户就可以知道前方是什么障碍物, 该系统实现了移动机器人的自主避障和采集障碍物信息的作用,可以用来探测未知环境。
5 结论
本文采用新型的超声波传感器,在ARM9 与嵌入式linux 为平台的移动机器人上实现了超声波的测距, 并利用超声波传感器控制运动系统和图像采集系统。该机器人目前已经成功应用与本项目的开发并取得良好的效果。
本文创新点:采用一种精度高的新型超声波传感器,用软件方法克服了它在ARM9 中不利于检测回波的问题,成功应用于移动机器人的运行轨迹控制, 使得机器人无论在行走和图像采集的即时性上都得到了很大的高。